DrkAngel
1 GW
Vetting the XYD-16 24V 450w DC Brush Motor

While hunting for a replacement, I found the manufactures specs of this motor.
View attachment 1
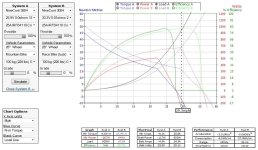
Most surprising was that this 450w "rated" motor is capable of 750w output!
No, not by over volting, simply by removing the current limitation.
Rated 450w with a 26A controller.
70A controller allows 750w output.
Why the 450w rating ... ?
Regulated to prevent damaging heat!
But also, it places maximum motor output right near top speed ... where it is needed, for continuous cruising.
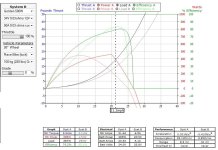
Hunting with the ebike.ca /simulator, I found a motor that matches the XYD-16 motor, at 24V with 13T motor sprocket mod, nearly identically.
The Nine Continents 3004

Proven out by comparing to 25A controller

Much easier to do a direct comparison

At 20mph+, torque, acceleration, efficiency etc. are nearly identical.
Motor is designed for cruising = ideal commuter.
Not ideal for hills, stop and go traffic etc.
You could regear to match your hills ... ?
But I recommend as more of a cruiser than a climber.
Of course ... with pedal assist at lower speeds, performance can be surprisingly good!
Manufactures specs in PDF
http://www.cytron.com.my/usr_attachment/XYD-16 Drawings.pdf
http://donar.messe.de/exhibitor/hannovermesse/2014/M619072/xyd-16-series-eng-296356.pdf
While hunting for a replacement, I found the manufactures specs of this motor.
View attachment 1
Most surprising was that this 450w "rated" motor is capable of 750w output!
No, not by over volting, simply by removing the current limitation.
Rated 450w with a 26A controller.
70A controller allows 750w output.
Why the 450w rating ... ?
Regulated to prevent damaging heat!
But also, it places maximum motor output right near top speed ... where it is needed, for continuous cruising.
Hunting with the ebike.ca /simulator, I found a motor that matches the XYD-16 motor, at 24V with 13T motor sprocket mod, nearly identically.
The Nine Continents 3004
Proven out by comparing to 25A controller
Much easier to do a direct comparison
At 20mph+, torque, acceleration, efficiency etc. are nearly identical.
Motor is designed for cruising = ideal commuter.
Not ideal for hills, stop and go traffic etc.
You could regear to match your hills ... ?
But I recommend as more of a cruiser than a climber.
Of course ... with pedal assist at lower speeds, performance can be surprisingly good!
Manufactures specs in PDF
http://www.cytron.com.my/usr_attachment/XYD-16 Drawings.pdf
http://donar.messe.de/exhibitor/hannovermesse/2014/M619072/xyd-16-series-eng-296356.pdf