Nechaus (and others),
Here is what I am planning to do...
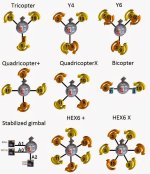
I'd like to make it a hexacopter. I dunno why, just what I would prefer
")
This is the frame I am looking at:
https://www.hobbyking.com/hobbyking...d_PCB_Version.html?strSearch=hexacopter frame
As this frame is a little bigger, which motors should I use?
Here's what I would like to do now (or soon, anyway):
1. Able to lift a payload of a GoPro or some similar camera (with gimbal)
2. Able to FPV
3. GPS flight controller with return-to-home and GPS-hold mode (or whatever it's called--stable flight)
4. Acro mode
Here's what I would like to try EVENTUALLY (maybe with this model, maybe not):
1. Long range FPV flight
2. Head's up display in FPV for attitude, airspeed, heading, battery life, etc.
If I get into FPV flight, I may even start building airplane models again. I tried that hobby years ago but got out of it, as I was having a very hard time seeing the planes against the horizon. If I could control them first-person, that's a whole new game!
The only equipment I currently have is a Dx6i, an ar6200 receiver, and a Hyperion 1420 battery charger. I own no LiPO batteries at the moment.
So, with that in mind, should I change from your original parts list on the first page? How about the controller and a HUD--how do you add a HUD to a system later?