OK, after some days riding my 2WD it is time to look back and do a first evaluation.
For completeness sake, first my bike usage. I usually bring the kids to school with the trailer, then return the trailer home and drive to work. After a day's work I get home, recharge my lipo's and are ready for the next day. I have no experience yet with trail riding. That will come when the weather is better.
The kids (1 or 2, depending on the weather and other circumstances that makes the older one unable to go to school herself) go to school 1.4 km away. That is 1 km flat, and the last 400 meter uphill on a 10% slope. I usually do not drive faster than 40km/h with the kids, and I take that 10% hill with 40km/h without even going WOT. Total weight is probably 180 kg (me 70kg, 2 kids a 15kg = 30kg, bike + lipos 30 kg, trailer 20kg), so that is not too shabby. Back from school, going down with the empty trailer, I need my brakes a lot. And here is where I am not happy with the huge weight of the 2WD and the crappy mechanical disc brake caliper on front. Once on the flat area, I do 45 km/h going home returning the trailer.
Anyway, I continue going to work without the trailer, doing 50-55km/h where possible, stopping for all 6-7 traffic lights, accelerating hard from standstill to WOT (55 km/h). Going back is the same. The commute is 4.5km with 2 steep but relatively short 10% hills on the way back. I take these hills at 45km/h. Again, not too shabby.
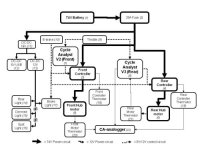
Now, I have the CA connected to my rear motor. During acceleration, current peaks to 55Amp. Mind you, that is rear only. When connected to the front, the CA measures peaks of 20-30 Amps when accelerating up to 30km/h. After that I guess the rear HT3525 takes the full responsibility and the front 9C 2810 is being taken on a tour (0 Amp).
When I come home, I have traveled 14km and spent 400Wh. That is 28Wh/km, or 45Wh/mile. My 10kg 20S3P 13.5Ah pack gives me about 1kWh. So my total range (disregarding LVC) is about 35km or 21 miles. That sucks, and leaves me with very little actual range, which is closer to 25km before I hit LVC at 3.6V/cell.
So to increase range, I can do the following:
- Get rid of the front motor. This gives probably the largest effect, at the cost of hill climbing power. I do not want to do this yet, but I may consider it.
- Drive slower. This takes away most of the fun. Again, I do not want to do this yet, but I may consider it.
- Increase my battery pack. This is one area where I see a bigger improvement. I have been reading this thread on super quality batteries, and I may switch from Lipo to Panasonic NCR18650A cells. However, I will need a lot of them in parallel in order to get my desired current and not exceed the C-rating. Taking a maximum of 80Amps, a cell of 3.1Ah will give 3.1Amp at 1C, meaning I need 25cells in parallel (25*3.1=77.5Ah). And at 20S25P, I get to 500 cells. At a weight of 50gram/cell (including tabs), that would be 25kg. Too much. Of course, I would then have a 77.5Ah x 80V = >6kWh pack. If I can get to discharge at 2C, it would obviously cut such a pack in half. And with a pack of 3kWh, my range would still be three times my current range, at 12.5kg. Any bright ideas?
So, I read with interest
Lyen's post about these batteries. His pack was 7S24P and almost 2kWh at 7.7kg. Hmm.