
Hello All,
I'm still designing my drivetrain theory for my YZF 250 conversion.
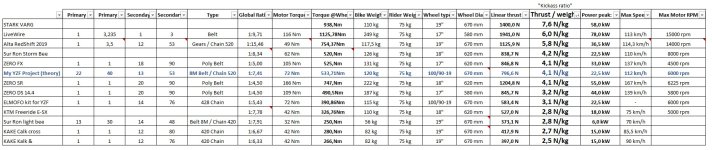
It's a bit hard sometimes to compare specs between all the e-bikes arround, so I tried to create a parameter that allows me to compare the "acceleration capacity @ low speed", which I'll call "Kick ass ratio".
To calculate it, I try to get enough public informations to get (or retro calculate) the torque @rear wheel, and the size of this wheel which gives me a linear thrust force. Then I divide it by the weight of the bike + a 75kg rider on it, and it gives me a figure that I can use for comparison. I think that figure is verry interesting, especialy for dirt bikes projects where max speed is not so much the point.
Here what I've found for the moment. There probably some aproximation, or maybe even mistakes, but it's seems like a good starting point.
Do not hesitate to give me the figures I miss, or correct me if I'm wrong somewhere. Or even give me your own built figures so I can add it in the comparison, just like I did with my project.
I'm still designing my drivetrain theory for my YZF 250 conversion.
It's a bit hard sometimes to compare specs between all the e-bikes arround, so I tried to create a parameter that allows me to compare the "acceleration capacity @ low speed", which I'll call "Kick ass ratio".
To calculate it, I try to get enough public informations to get (or retro calculate) the torque @rear wheel, and the size of this wheel which gives me a linear thrust force. Then I divide it by the weight of the bike + a 75kg rider on it, and it gives me a figure that I can use for comparison. I think that figure is verry interesting, especialy for dirt bikes projects where max speed is not so much the point.
Here what I've found for the moment. There probably some aproximation, or maybe even mistakes, but it's seems like a good starting point.
Do not hesitate to give me the figures I miss, or correct me if I'm wrong somewhere. Or even give me your own built figures so I can add it in the comparison, just like I did with my project.
")