
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Opinions please: VESC - Vedder Electronic Speed Controllers
- Thread starter john61ct
- Start date
SlowCo
1 MW

WOW
SlowCo
1 MW
Not from me unfortunately. But it does seem to be a very interesting controller for high power ebikes and other vehicles. Although at that price point there are other suitable controllers out there.
Suggestions for other high power controllers,
anything above what a Phaserunner handles
would also be appreciated.
Sevcon, ASI BAC, Kelly and Sabvoton are the ones I've come across, but have not seen any consensus as to build quality or ease of configuration.
anything above what a Phaserunner handles
would also be appreciated.
Sevcon, ASI BAC, Kelly and Sabvoton are the ones I've come across, but have not seen any consensus as to build quality or ease of configuration.
john61ct said:Suggestions for other high power controllers,
anything above what a Phaserunner handles
would also be appreciated.
Sevcon, ASI BAC, Kelly and Sabvoton are the ones I've come across, but have not seen any consensus as to build quality or ease of configuration.
Do you have other criteria (e.g. both the VESC based controllers and Phaserunner are pretty compact), like FOC, variable regen, field weakening, etc., or just high current).
district9prawn
1 kW
Price aside, I feel the vesc controllers don't make sense for DD hubs due to the lower voltage limit. Plus there are so many other controllers to choose from that work great with hubs. If you need sensorless or a very high erpm for your motor and the voltage limit is not a problem then it make more sense.
Stuff off that trampa website is really expensive. If you are keen on soldering there are a few high power vesc designs that you can build yourself for much less.
Stuff off that trampa website is really expensive. If you are keen on soldering there are a few high power vesc designs that you can build yourself for much less.
As I stated, eBike noob here looking for specific suggestions to help further my research.E-HP said:Do you have other criteria (e.g. both the VESC based controllers and Phaserunner are pretty compact), like FOC, variable regen, field weakening, etc., or just high current).
Compact size is a plus of course, but not at the expense of robust components, build quality, longevity & reliability far from civilization.
Variable e-brake is a must, heavy cargo / tandem in mountain country, so 20+ minutes of drag braking, lots of heat dissipation needed there.
I've only heard about FOC in the context of smooth acceleration, so sure sounds good.
No idea what field weakening is.
I have no reason to go over 52V nominal, likely less is fine.district9prawn said:I feel the vesc controllers don't make sense for DD hubs due to the lower voltage limit.
Need power for torque, don't want high speeds at all.
> Plus there are so many other controllers to choose from that work great with hubs.
List some examples please is what I'm asking.
> If you need sensorless or a very high erpm for your motor
Dunno what either means, but if allows for smooth operation using cheaper dumb motors then great.
> If you are keen on soldering there are a few high power vesc designs that you can build yourself for much less
Yes, links please.
SlowCo
1 MW
ProgramThyself
100 mW
- Joined
- May 20, 2019
- Messages
- 38
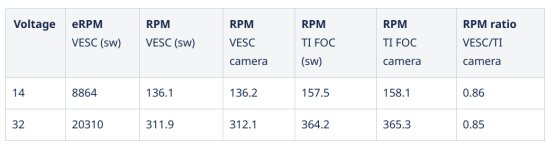
I've been trying a VESC 6 on a test stand. My first impression is that it is slower than TI eval boards that are running code based on TI's InstaSPIN examples. Unloaded wheel RPM's are reduced by 15 %. 2 % can be explained by the maximum PWM limit (95 % VESC vs. 97 % TI). But the remainder is a puzzle. Perhaps the scaling associated with space-vector modulation or other details of the FOC implementation are responsible?
My TI eval board thread: https://endless-sphere.com/forums/viewtopic.php?f=30&t=102938
Camera RPM measurements: https://endless-sphere.com/forums/viewtopic.php?f=30&t=101257
My TI eval board thread: https://endless-sphere.com/forums/viewtopic.php?f=30&t=102938
Camera RPM measurements: https://endless-sphere.com/forums/viewtopic.php?f=30&t=101257
Attachments
Hummina Shadeeba
1 MW
Foc is slower than in bldc mode with square waves and that’s normal but never been a problem for me but u can chose the bldc mode as well
The vesc is great: smooth and quiet and very versatile and easy to program. Easy to confirm
If ur motor is working right and it will graph everything in real time and lots of adjusting possible. Can even have a bunch of info sent to your phone. And it’s push to turn on feature is nice and saves space and in my experience they break often but haven’t heard complaints with this one. I just bought the regular 6 for a bike and not the high power one above and I doubt you’d need that high power one which has real motorcycle output and unless ur motor can handle it I wouldn’t bother. I’ve known others who’ve had success with the regular 6 on a bike and rarely shutting down from over-temp. Could always add a big heatsink if that was an issue. As long as it doesn’t break. the cheap vescs from China often do.
The vesc is great: smooth and quiet and very versatile and easy to program. Easy to confirm
If ur motor is working right and it will graph everything in real time and lots of adjusting possible. Can even have a bunch of info sent to your phone. And it’s push to turn on feature is nice and saves space and in my experience they break often but haven’t heard complaints with this one. I just bought the regular 6 for a bike and not the high power one above and I doubt you’d need that high power one which has real motorcycle output and unless ur motor can handle it I wouldn’t bother. I’ve known others who’ve had success with the regular 6 on a bike and rarely shutting down from over-temp. Could always add a big heatsink if that was an issue. As long as it doesn’t break. the cheap vescs from China often do.
ProgramThyself
100 mW
- Joined
- May 20, 2019
- Messages
- 38
But the TI boards are also running FOC. Some more info:Foc is slower than in bldc mode with square waves and that’s normal but never been a problem for me but u can chose the bldc mode as well
14 V - VESC Isupply = 0.51 A, TI Isupply = 0.63 A
32 V - VESC Isupply = 0.75 A, TI Isupply = 0.89 A
district9prawn
1 kW
Wouldn't 15% faster be even faster than a square wave controller at full speed?
ProgramThyself said:But the TI boards are also running FOC. Some more info:Foc is slower than in bldc mode with square waves and that’s normal but never been a problem for me but u can chose the bldc mode as well
14 V - VESC Isupply = 0.51 A, TI Isupply = 0.63 A
32 V - VESC Isupply = 0.75 A, TI Isupply = 0.89 A
I've read bits and pieces of the InstaSpin documentation, and I think there's support for overmodulation built into it. How much faster that would make a motor spin I don't know, but it might account for what you're talking about.
Hummina Shadeeba
1 MW
Interesting. My uneducated assumption is that the higher speed program, TI boards or something, has a higher kv essentially and lower kt, so lower km, and the motor is less efficient when run with the TI program. I know nothing bout programs but that's an assumption based on basic motor performance characteristics. Is that unrelated? Probably in the thread linked but impatientProgramThyself said:But the TI boards are also running FOC. Some more info:Foc is slower than in bldc mode with square waves and that’s normal but never been a problem for me but u can chose the bldc mode as well
14 V - VESC Isupply = 0.51 A, TI Isupply = 0.63 A
32 V - VESC Isupply = 0.75 A, TI Isupply = 0.89 A
ProgramThyself
100 mW
- Joined
- May 20, 2019
- Messages
- 38
I've been trying a VESC 6 on a test stand. My first impression is that it is slower than TI eval boards that are running code based on TI's InstaSPIN examples. Unloaded wheel RPM's are reduced by 15 %.
After a month of use, I'm liking the VESC more and more
Positive:
- The right throttle drives forward. The left throttle brakes and drives backward. [customized code from district9prawn]
- Software and firmware are open source. It was easy to add automatic "cruise control" that saves thumb strength. After 7 seconds of holding the right throttle high, it stays high until brake is applied. The system is experiment-friendly.
- Now there is a good balance between left and right thumbs. With the stock controller (S06 type), my right thumb got tired on long trips.
- Custom features can be programmed such as a limp-home mode in case of throttle / brake-sensor failure. Safety checks (i.e. full engagement of wheelchair attachment clamps) can also be requested through the phone app before enabling higher speeds (some programming required).
- Torque-control is sweet. No more annoying braking due to minor unintentional throttle movements.
- FOC is super smooth.
- No violent synchronization jerk when reengaging the throttle after coasting. This may stop self-loosening of the axle nuts.
- The phone app logs data from the controller, inertial unit, and phone GPS (10 Hz rate).
Notable:
- Parameter settings and speed display are through Bluetooth and a phone app. This allows for nice graphics and on-the-fly adjustment, but makes the setup more cumbersome for every day use. Sunlight readability is low.
- The VESC 6 is spec'd for 60 V max, which doesn't allow for common 48 V (13S) e-bike batteries.
Issues to be addressed:
- Weatherproofing. As is, the controller is unlikely to survive a rainstorm and needs a protective enclosure.
- At above-normal speed (e.g. descending a hill), the motor brake can kick in very hard, possibly blowing the battery fuse and causing other damage. I can probably avoid this by modifying the firmware.
- No odometer. This is important for periodic maintenance. I've been modifying the VESC Tool to add this feature.
Some pix and links are on my blog. Cheerio.
https://ffuser.blogspot.com/2020/08/vesc.html
zacksc
100 W
Not really an expert or anything, but my personal opinion is that baserunner and phaserunner are extremely awesome in terms of size, design, power and everything I understand.
Similar threads
- Replies
- 3
- Views
- 2,002
- Replies
- 14
- Views
- 736
- Replies
- 23
- Views
- 3,520
- Replies
- 7
- Views
- 968
- Replies
- 2
- Views
- 1,335