Toorbough ULL-Zeveigh said:
what i said in a broader sense to include more than transistors.
It all goes back to supply voltage. The power you can get out of a load is given by its resistance (at DC) or its impedance (at AC.)
At 32 ohms you can get 4.5 watts out of a 12 volt supply. At 4 ohms you can get 36 watts. So often car audio goes with the lower resistance.
Want more power? You can go to 2 ohms, although now you are going to need seriously heavy speaker wire to carry the currents. Or you could boost the voltage with a DC/DC.
You can't have a motor with no impedance of any kind.
no but you can (theoretically) approach it.
Not really.
An absolutely ideal motor will present an impedance equal to its mechanical power output. Outputting 100 watts? Then if you are driving the motor at 36 volts, you will see an effective impedance of 13 ohms. Even if it uses superconducting wire, frictionless bearings etc etc.
At no load you would actually see close to infinite impedance in an ideal motor. (Assuming one that behaves like a DC PM motor, that is.) But power in would approach zero.
how is it possible to extract any real work out of this motor?
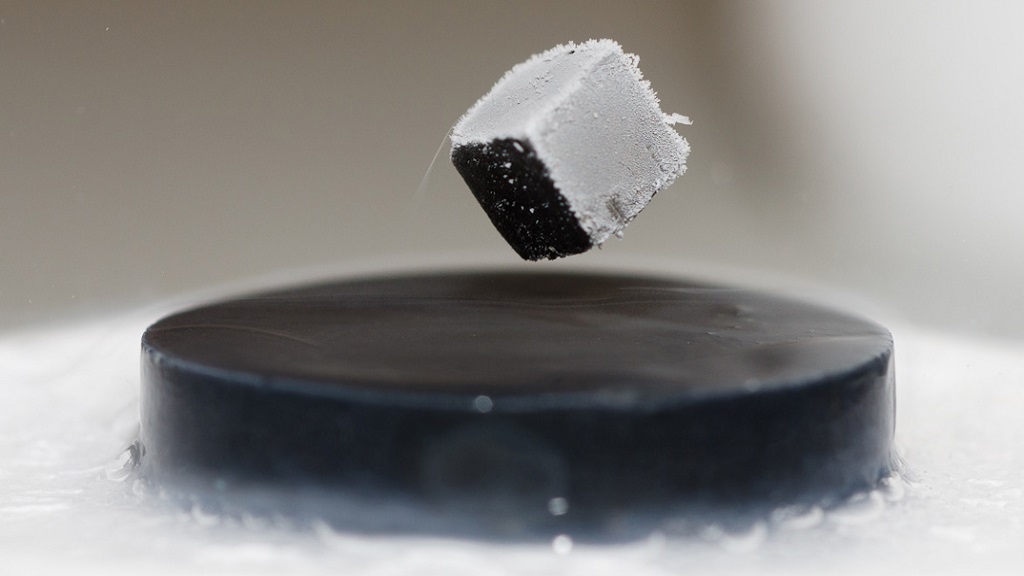
That's not a motor. It's a picture of the Meissner Effect, which allows magnetic levitation over a superconductor.