
Vbruun
100 W
- Joined
- Sep 26, 2019
- Messages
- 294
My friend and I have been working on modifying the bosch gen 2 motors to accept a VESC as the controller to be able to run third party batteries and remove the speed limit.
For their size, the bosch motors are pretty stout and will run all day @30 phase amps, 20 batt amps and 36v, making them a nice, reliable alternative to the tsdz2.
For better startup, he tried to add hall sensors in the motor. We used the ss413A sensor and mounted them like so.
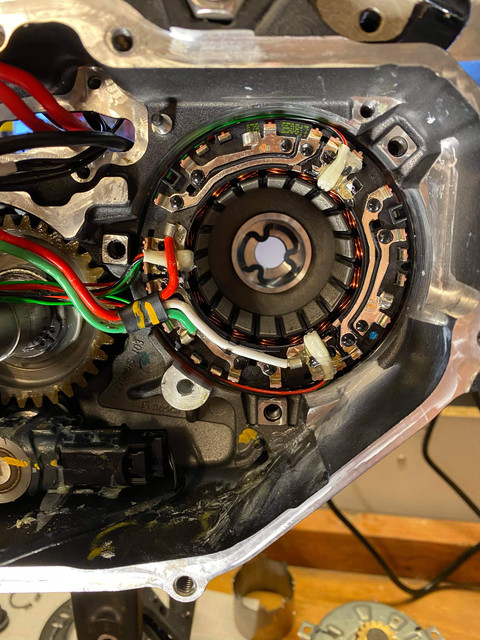
But the signal on the hall sensor looks weird to me and the motor runs pretty badly from it
https://youtu.be/I7BdWSo1QeA
It is not a problem with the VESC because it works fine for startup and will just switch over to sensorless @ low ERPM, but we considered switching to the KT controllers with open source firmware for more ebike features such as speed limit and easier management of assist levels.
Does anyone have any idea why we got those results?
- Victor
For their size, the bosch motors are pretty stout and will run all day @30 phase amps, 20 batt amps and 36v, making them a nice, reliable alternative to the tsdz2.
For better startup, he tried to add hall sensors in the motor. We used the ss413A sensor and mounted them like so.
But the signal on the hall sensor looks weird to me and the motor runs pretty badly from it
https://youtu.be/I7BdWSo1QeA
It is not a problem with the VESC because it works fine for startup and will just switch over to sensorless @ low ERPM, but we considered switching to the KT controllers with open source firmware for more ebike features such as speed limit and easier management of assist levels.
Does anyone have any idea why we got those results?
- Victor
