
Hey guys.
I'm starting a project that is going to require a high-torque, low-speed motor because I'm running a ~30 inch diameter tire.
To throw some numbers out, I'm looking for:
~100+ lb-ft of peak torque. (135 Nm) (90 lbs thrust)
~3000W of peak (motor) power.
~400 RPM (unloaded speed = ~35 MPH for my ~30" diameter tire application)
Justin suggested the GMAC 10T (clutchless grin-special), I may go with that in the end but I have a rightful fear of gears for my application. So I'd rather find a DD motor...
I thought I found the perfect motor:
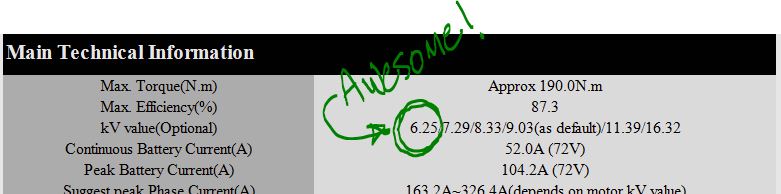
QS 205 50H V3 3000W Hub Motor w/ a 6.25 Kv winding.

Here's the Grin Simulation showing it can eat 15% grade hills all day long (Cromo 5004 w/ KV adjusted accordingly):
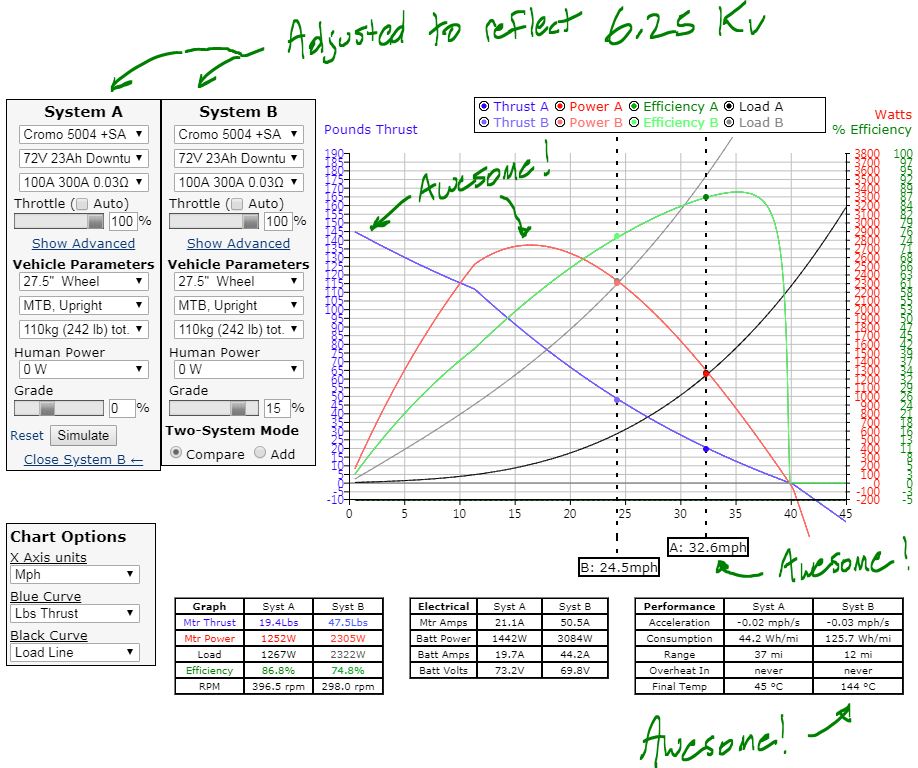
https://www.ebikes.ca/tools/simulat...in&mass_b=110&hp_b=0&grade_b=15&k_b=.67&k=.67
That's a lot of awesome.
Only problem is:
According to a QS sales-rep:
QS doesn't actually make any of their 205 motors with anything less than 9.03 Kv.
(despite what it says on their website)
So, the quest for the illusive high-torque, low-speed hub motor continues...
Any suggestions?
Thanks.
-Josh!
I'm starting a project that is going to require a high-torque, low-speed motor because I'm running a ~30 inch diameter tire.
To throw some numbers out, I'm looking for:
~100+ lb-ft of peak torque. (135 Nm) (90 lbs thrust)
~3000W of peak (motor) power.
~400 RPM (unloaded speed = ~35 MPH for my ~30" diameter tire application)
Justin suggested the GMAC 10T (clutchless grin-special), I may go with that in the end but I have a rightful fear of gears for my application. So I'd rather find a DD motor...
I thought I found the perfect motor:
QS 205 50H V3 3000W Hub Motor w/ a 6.25 Kv winding.
Here's the Grin Simulation showing it can eat 15% grade hills all day long (Cromo 5004 w/ KV adjusted accordingly):
https://www.ebikes.ca/tools/simulat...in&mass_b=110&hp_b=0&grade_b=15&k_b=.67&k=.67
That's a lot of awesome.
Only problem is:
According to a QS sales-rep:
QS doesn't actually make any of their 205 motors with anything less than 9.03 Kv.
(despite what it says on their website)
So, the quest for the illusive high-torque, low-speed hub motor continues...
Any suggestions?
Thanks.
-Josh!
