TorontoBuilder
100 W
Having given up on the thought of owning a boardtrack racer from the early 1900's due to a lack of about 250K in the ole bank account I have concluded that the only way to capture that feel is with an electric build.
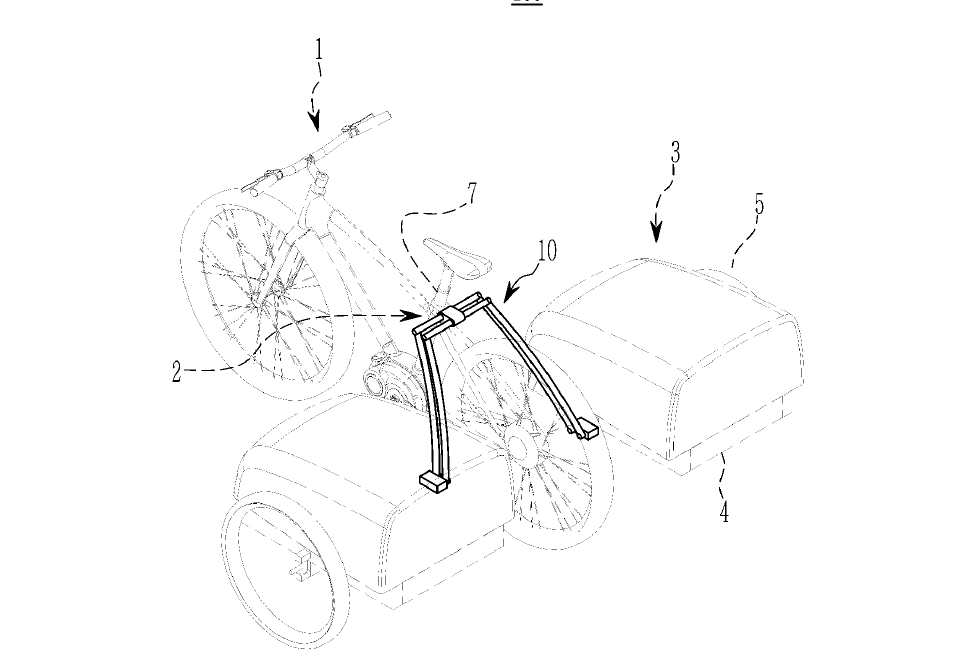
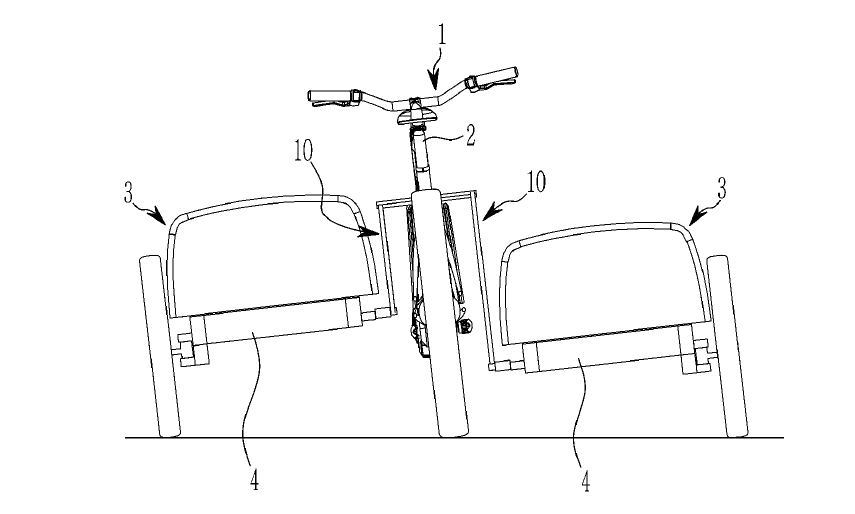
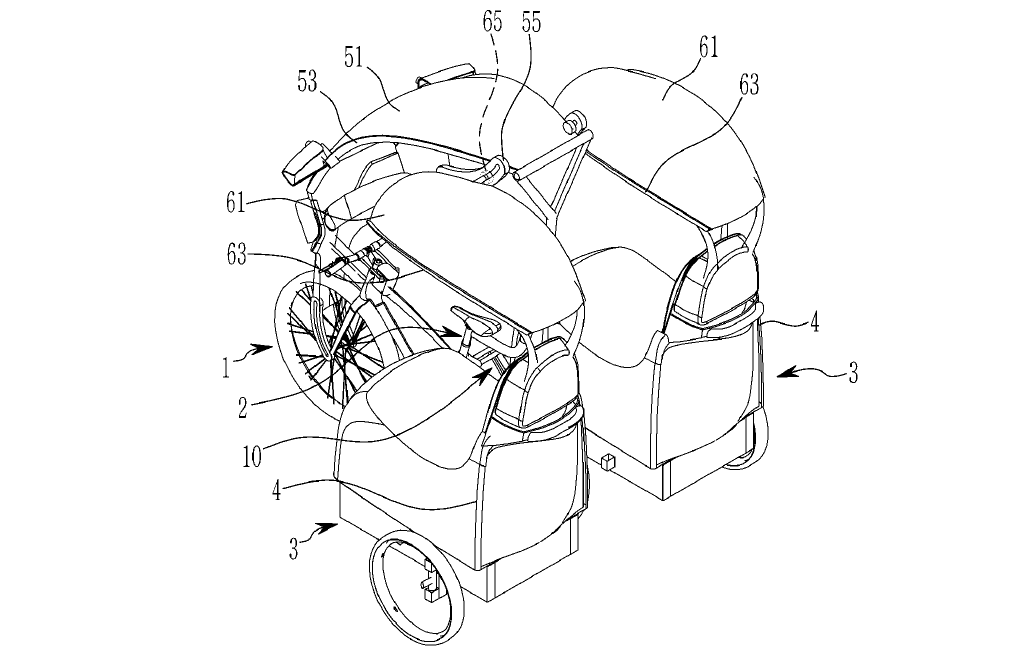
As is my mantra, build everything from scratch that your skills allow. So for me that means the frame, the oil cooled 2-4 kW motor, battery pack, fenders, rear rack, and sidecar with exchangeable cargo box or seat for two small dogs should be doable. My goal is to use this to ride many of Ontario's rural rail trails with my dogs. I hope that they like it better than the dog trailer we had.
I've selected the 1911 Flying Merkel Model W with single cylinder engine.
So tonight I knocked out a side plan view drawing to print full scale to use as a guide template to build the frame. I still need to do the front and rear plan views and the elevation views to set up a strongback jig for welding up the frame.
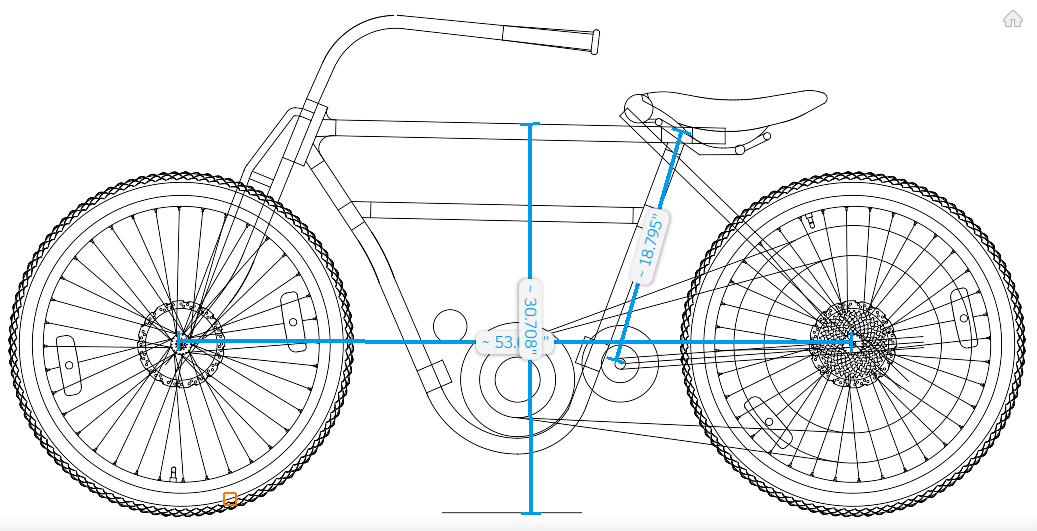


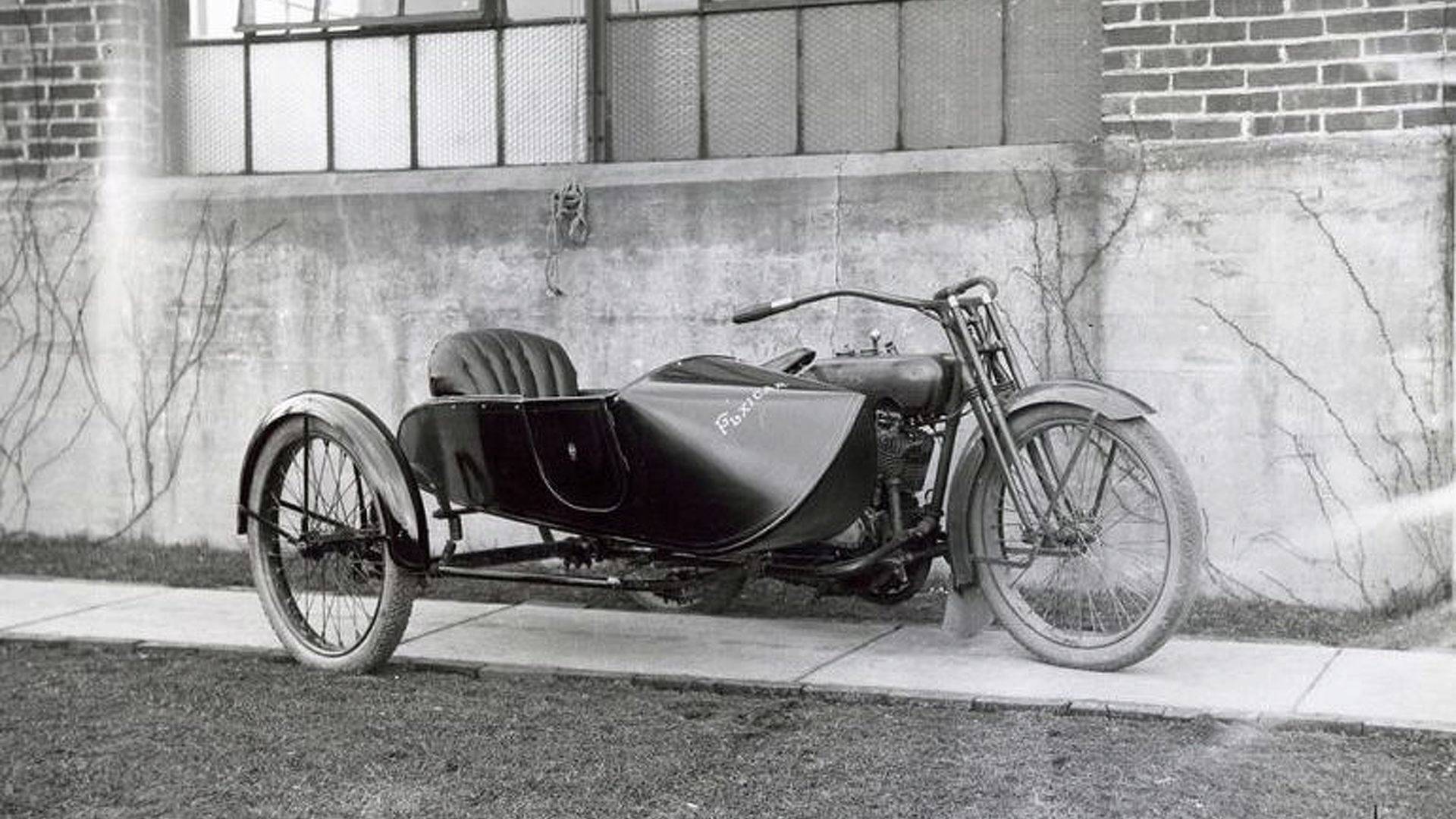
I've chosen this bike for the spring frame and forks, for the challenge of reverse engineering those elements with little information on how the parts are built and assembled.
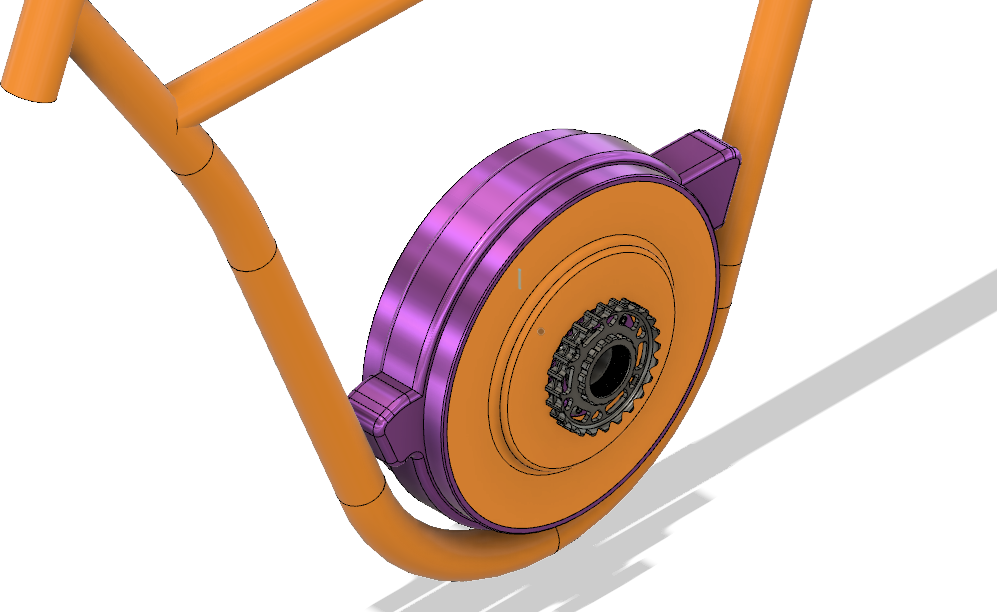
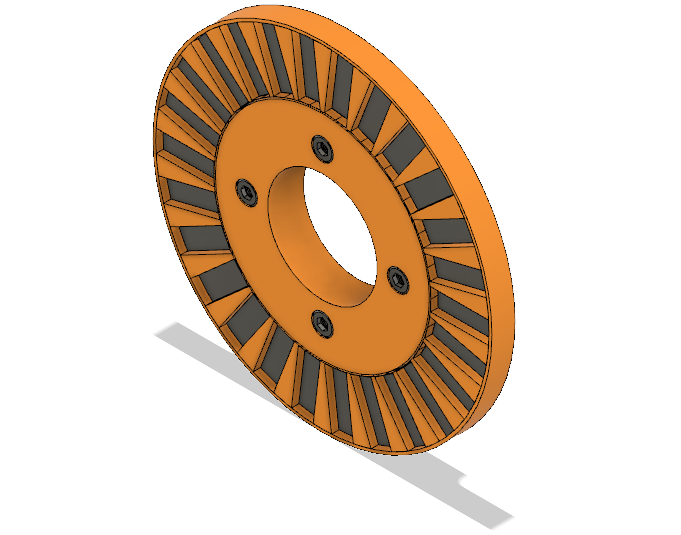
I'm torn between maintaining exactly the same design, or modifying the design to have better geometry. I am committed to changing the seat and chain stays so that the left side is symmetrical with the right side, rather than left side stays that project outwards to accommodate the wide leather drive belt and drive gear. I'm going to use modern gates belt and timing gears for this which saves that space. I'll emulate Tom Staton's segmented gear attached to the brake disk on the rear hub.
Debating a Nuvinci CVT N171 or something else.
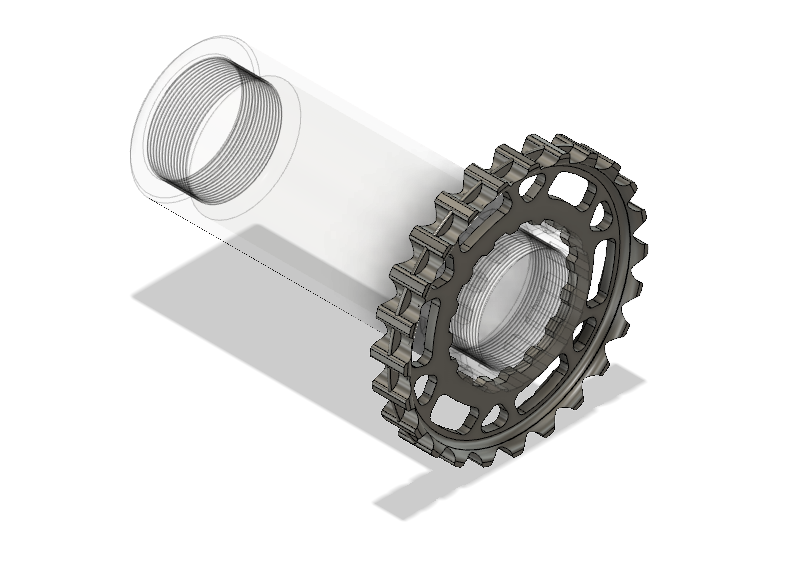
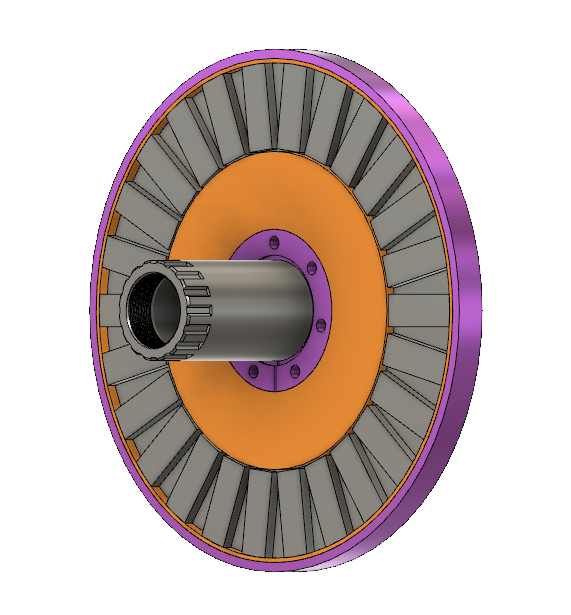
With a custom designed motor with a hollow spindle core like on a lathe I could place the cranks thru the spindle core along with a PAS torque sensor. If I do this I attain better symmetrical geometry and Q factor. But then it doesn't look original. I can maintain look of original and improve the symmetry and the Q factor but the pedaling geometry not so much. I'm not 100% certain of this though since I'm never designed a frame and haven't had time to model a rider in the drawing yet.
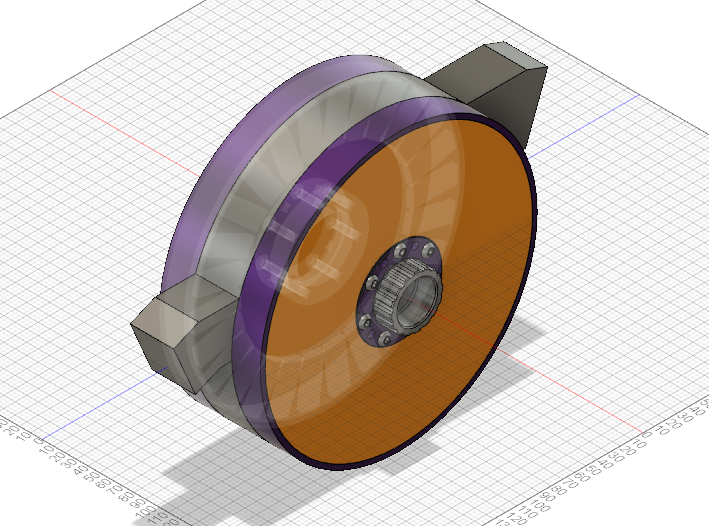
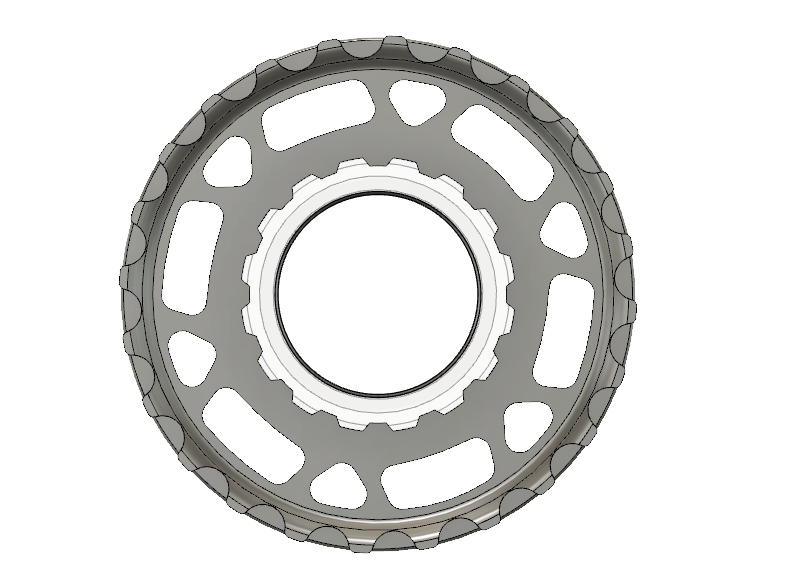
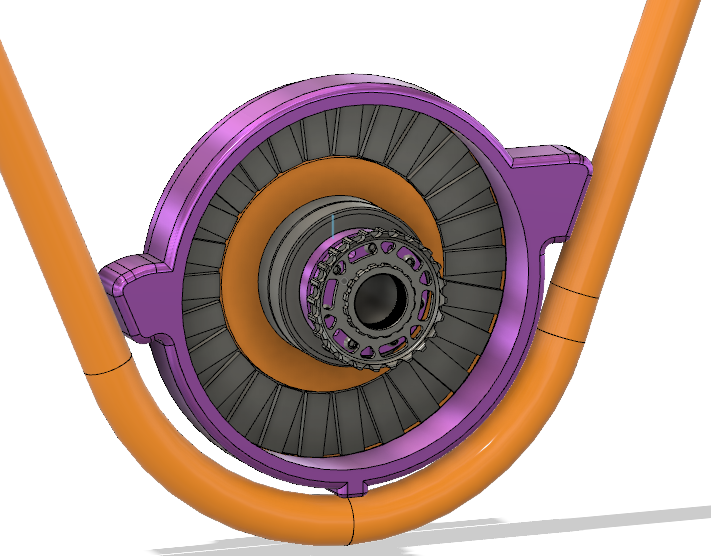
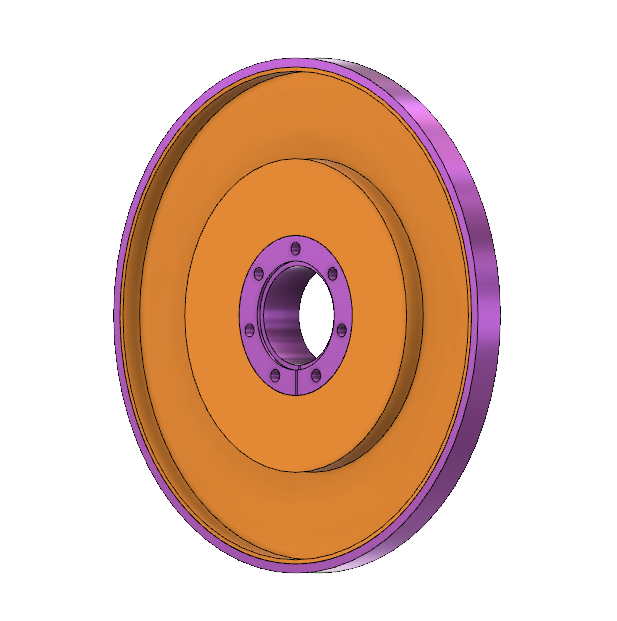
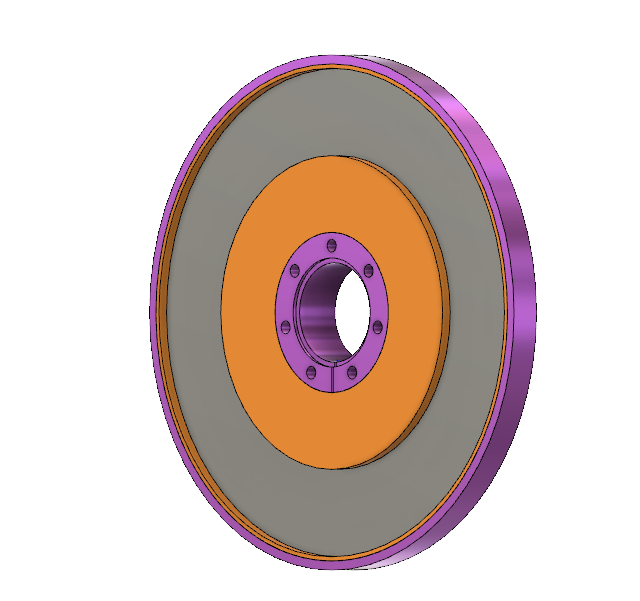
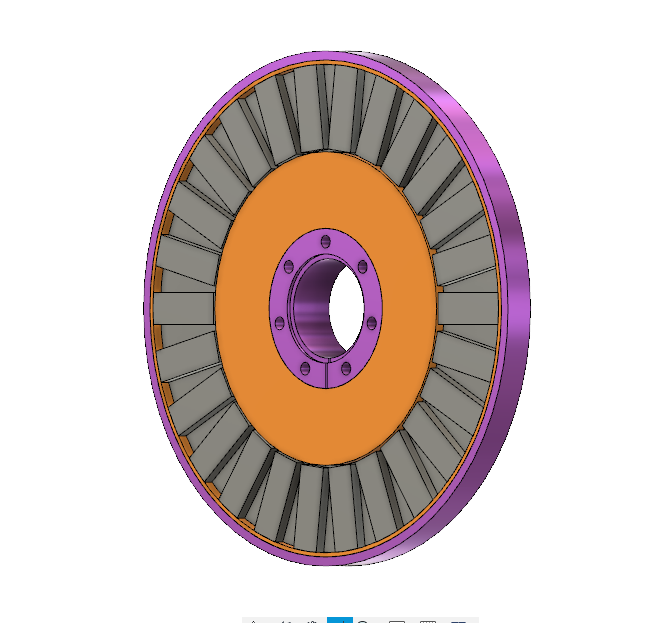
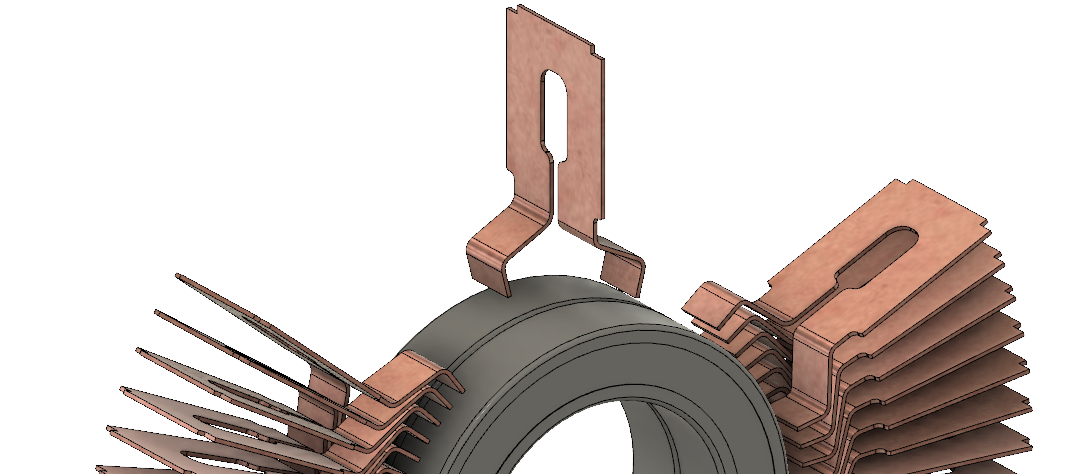
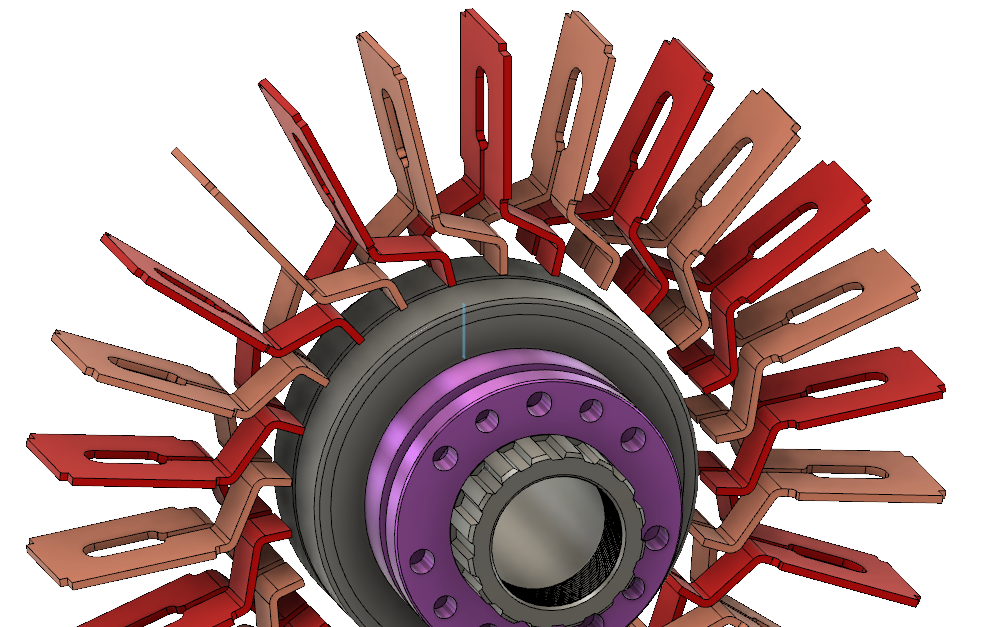
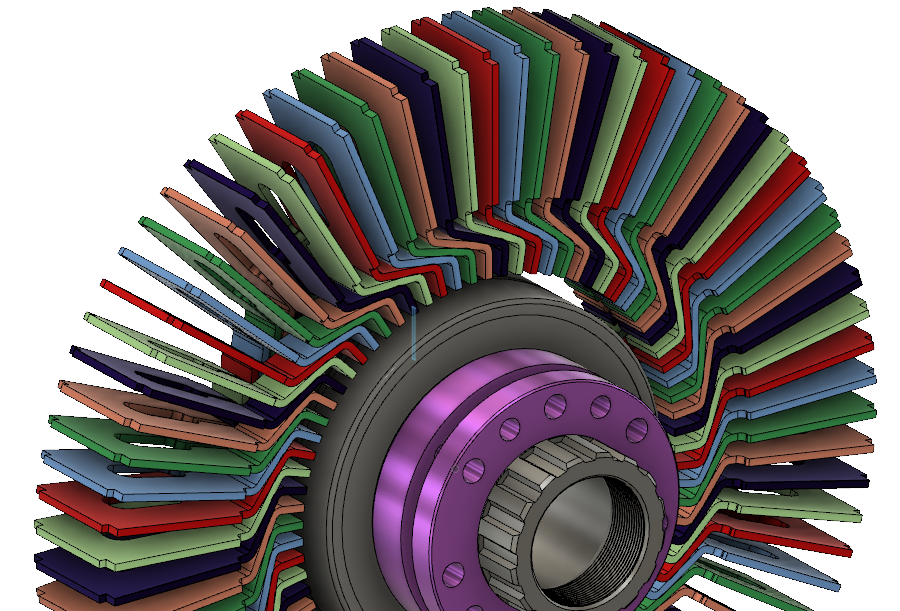
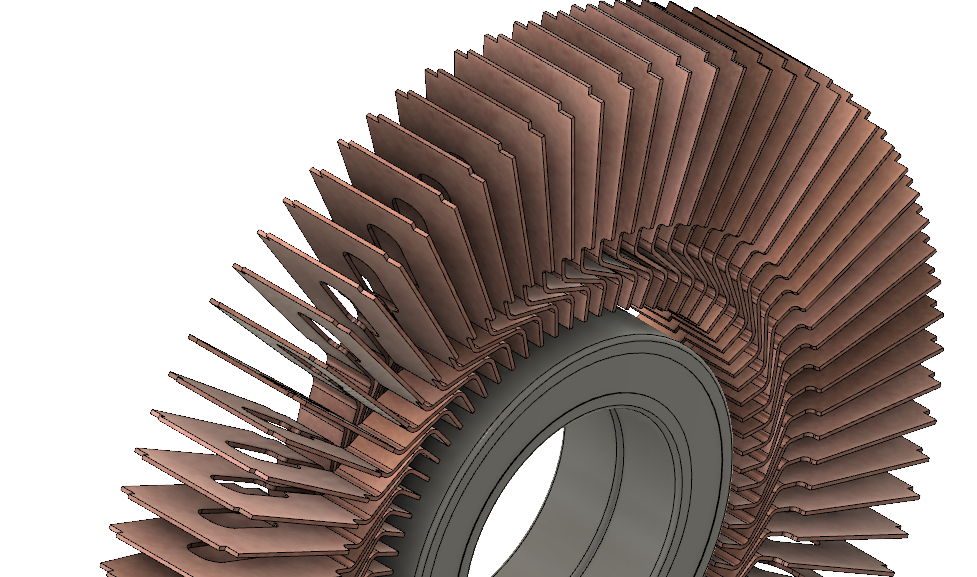
I plan to mimic a Binova Flow's external uncovered rotor design to some extent to create very narrow motor. I can even machine the radial edge of the rotor to act as a gear that interlocks with a drive gear for a very small custom machined gear oil pump to allow active motor and battery cooling like with the magnax motor. That pump will bolt to the aluminum flange of the motor stator. The stator will be about 1.25" thick and be fully potted.
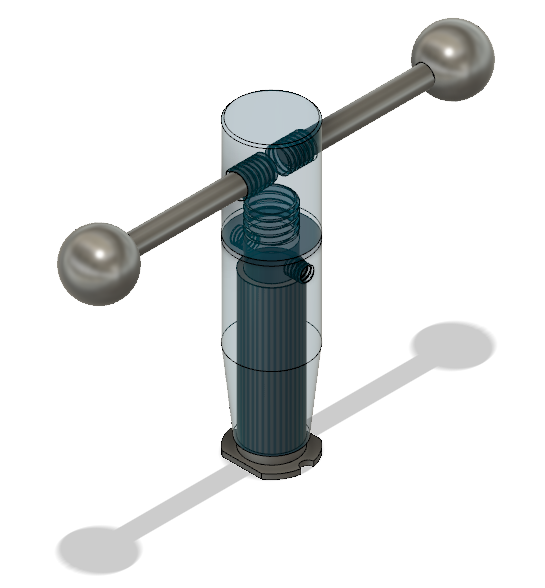
I'll mount the pump where the magneto usually went on the merkel. I'll use the space of the cylinder to instead have a similarly shaped cylindrical radiator housing. A copper coil will be epoxied into the inner surface of the cylinder. I'll put the batteries in the gas tank. The inside of the gas tank shell will have copper wound cooling core.. I'll make the oil lines for this mimic the look of the fuel lines of old.
Although I realise an intermittently operated tiny electric pump controlled by Arduino reading temp sensors in both the battery and motor is likely far more efficient.
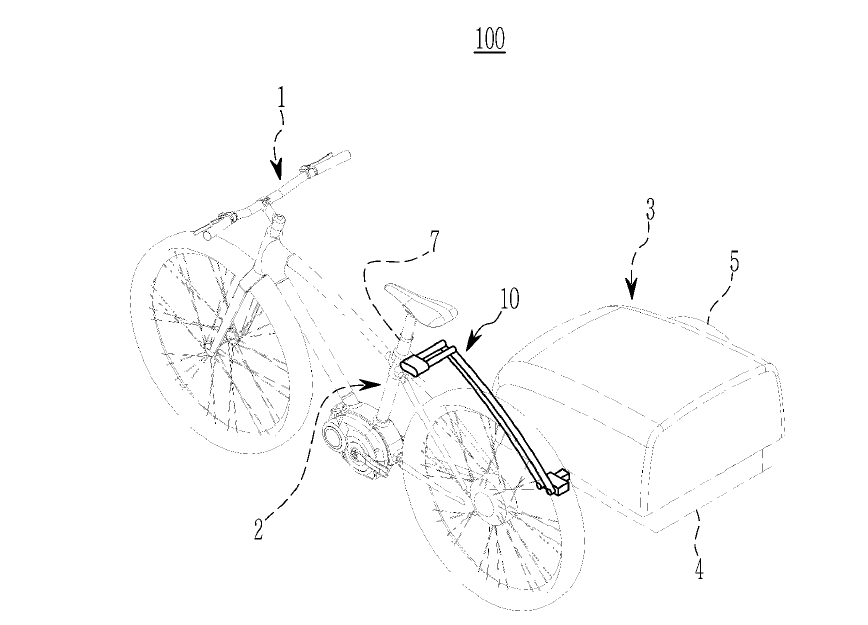
The main parts of the build I will feature here are the bike frame, the motor and drive train, the cooling system, the battery pack and the sidecar. I haven't seen anyone here with such a build. I'm debating having a hub motor and battery pack on the sidecar for extra boost.
Acknowledgments:
I was inspired by the Laprise broadtracker, juicer ebikes, and APL's cruiser build. mostly though the kick in the pants and final design inspirations were a result of my reviewing reams of research while responding to APL's build thread.
NOTE:
I dont think that I have seen active oil based cooling or a hollow motor axle or spindle used at all in a build on this forum. The Binova flow tweaked me to that idea about a year ago but it was not until looking at APLs build that I tweaked how to address Binova's horrid Q factor.
IF anyone knows of a build here that has these ideas implemented in them please let me know.
As is my mantra, build everything from scratch that your skills allow. So for me that means the frame, the oil cooled 2-4 kW motor, battery pack, fenders, rear rack, and sidecar with exchangeable cargo box or seat for two small dogs should be doable. My goal is to use this to ride many of Ontario's rural rail trails with my dogs. I hope that they like it better than the dog trailer we had.
I've selected the 1911 Flying Merkel Model W with single cylinder engine.
So tonight I knocked out a side plan view drawing to print full scale to use as a guide template to build the frame. I still need to do the front and rear plan views and the elevation views to set up a strongback jig for welding up the frame.
I've chosen this bike for the spring frame and forks, for the challenge of reverse engineering those elements with little information on how the parts are built and assembled.
I'm torn between maintaining exactly the same design, or modifying the design to have better geometry. I am committed to changing the seat and chain stays so that the left side is symmetrical with the right side, rather than left side stays that project outwards to accommodate the wide leather drive belt and drive gear. I'm going to use modern gates belt and timing gears for this which saves that space. I'll emulate Tom Staton's segmented gear attached to the brake disk on the rear hub.
Debating a Nuvinci CVT N171 or something else.
With a custom designed motor with a hollow spindle core like on a lathe I could place the cranks thru the spindle core along with a PAS torque sensor. If I do this I attain better symmetrical geometry and Q factor. But then it doesn't look original. I can maintain look of original and improve the symmetry and the Q factor but the pedaling geometry not so much. I'm not 100% certain of this though since I'm never designed a frame and haven't had time to model a rider in the drawing yet.
I plan to mimic a Binova Flow's external uncovered rotor design to some extent to create very narrow motor. I can even machine the radial edge of the rotor to act as a gear that interlocks with a drive gear for a very small custom machined gear oil pump to allow active motor and battery cooling like with the magnax motor. That pump will bolt to the aluminum flange of the motor stator. The stator will be about 1.25" thick and be fully potted.
I'll mount the pump where the magneto usually went on the merkel. I'll use the space of the cylinder to instead have a similarly shaped cylindrical radiator housing. A copper coil will be epoxied into the inner surface of the cylinder. I'll put the batteries in the gas tank. The inside of the gas tank shell will have copper wound cooling core.. I'll make the oil lines for this mimic the look of the fuel lines of old.
Although I realise an intermittently operated tiny electric pump controlled by Arduino reading temp sensors in both the battery and motor is likely far more efficient.
The main parts of the build I will feature here are the bike frame, the motor and drive train, the cooling system, the battery pack and the sidecar. I haven't seen anyone here with such a build. I'm debating having a hub motor and battery pack on the sidecar for extra boost.
Acknowledgments:
I was inspired by the Laprise broadtracker, juicer ebikes, and APL's cruiser build. mostly though the kick in the pants and final design inspirations were a result of my reviewing reams of research while responding to APL's build thread.
NOTE:
I dont think that I have seen active oil based cooling or a hollow motor axle or spindle used at all in a build on this forum. The Binova flow tweaked me to that idea about a year ago but it was not until looking at APLs build that I tweaked how to address Binova's horrid Q factor.
IF anyone knows of a build here that has these ideas implemented in them please let me know.


.jpg")








.jpg")

.jpg")








")