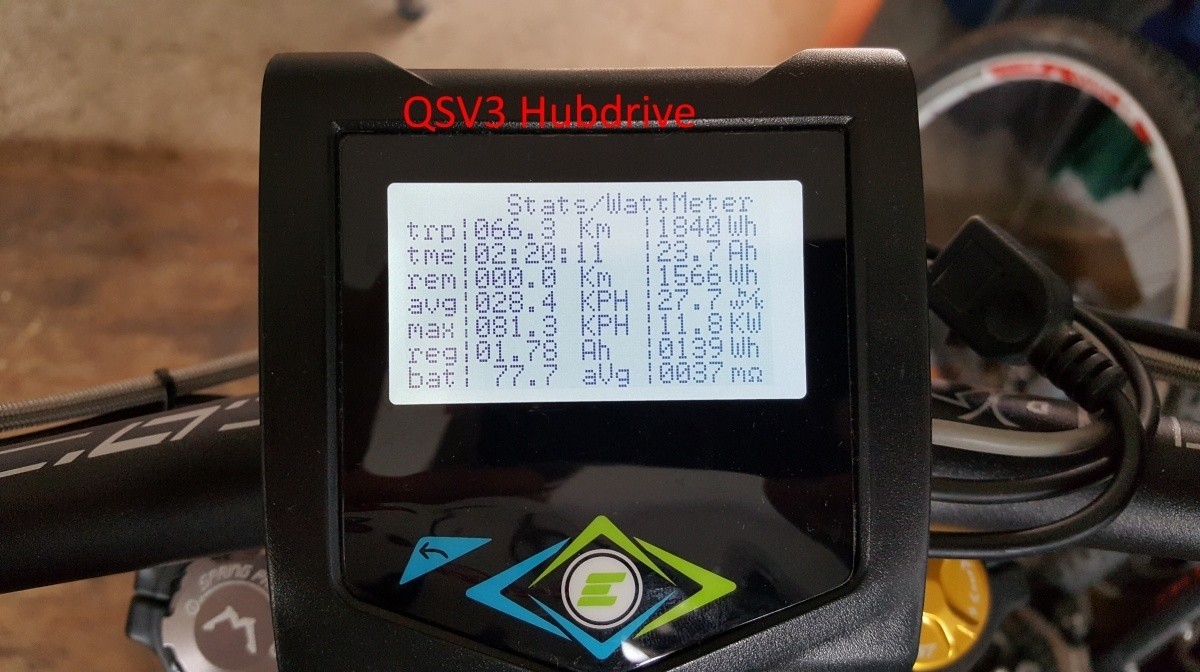
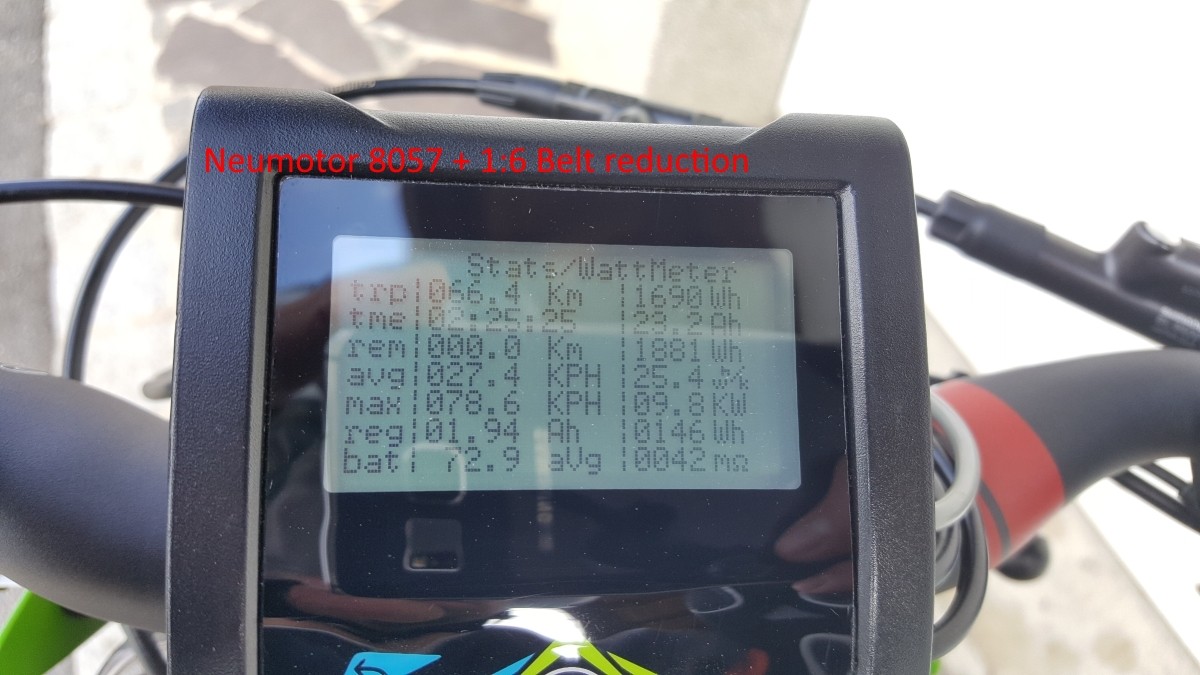
So far i have ridden more than 1000km now. Aside from the blown Max-E and other problems with the controller (more about that later) i had no issues with the drive system.
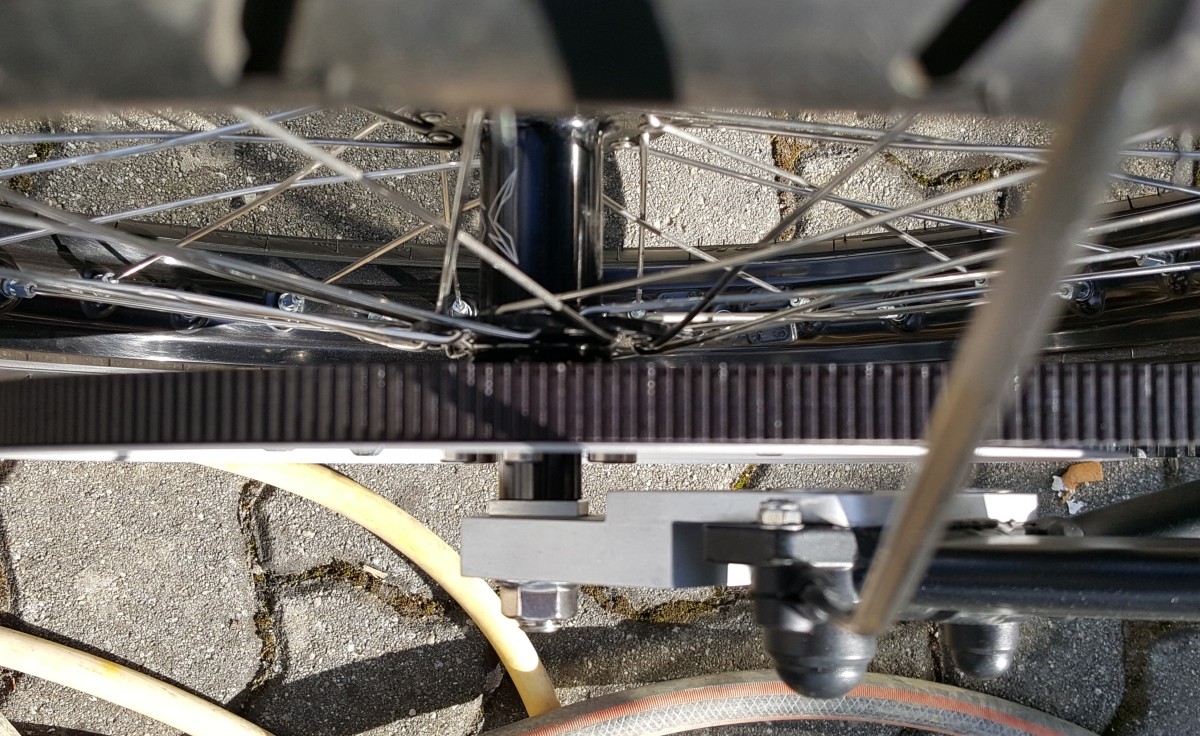
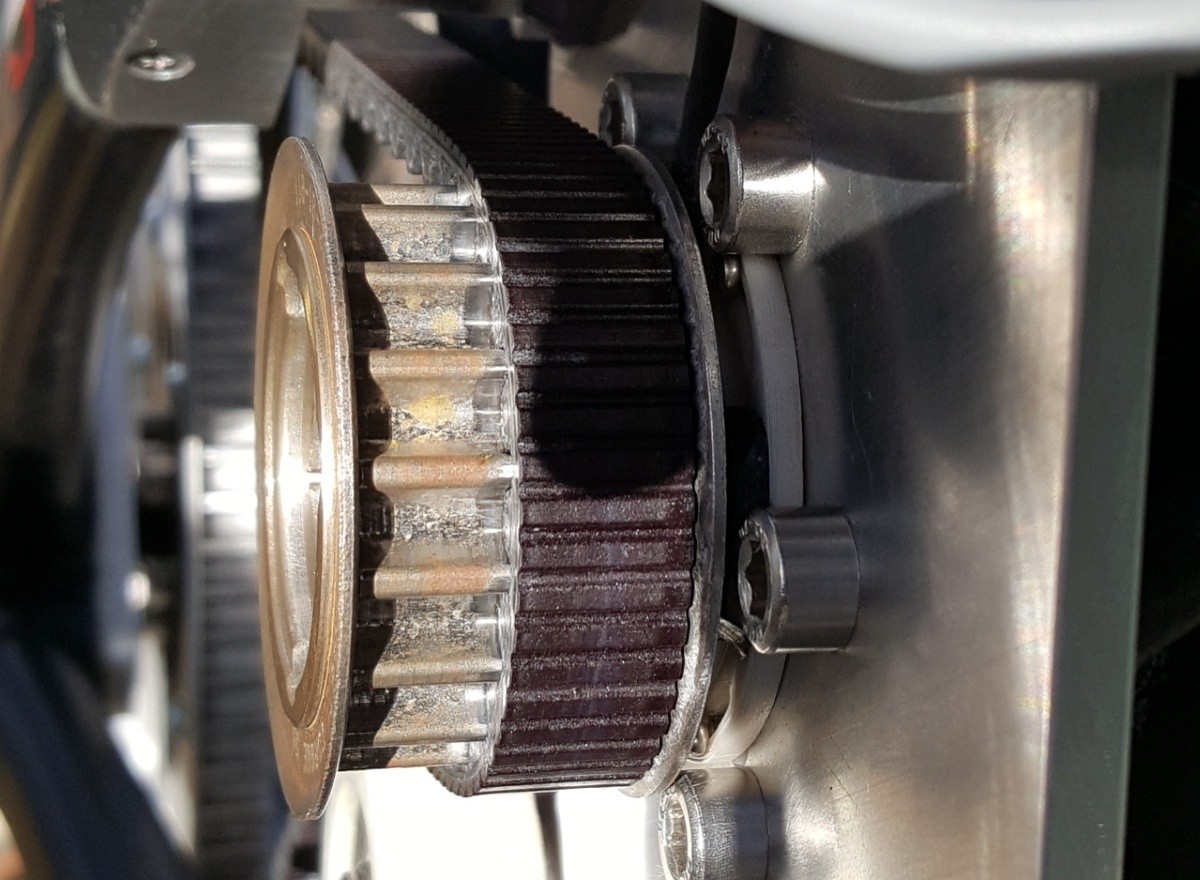
The belt shows a little wear in the form of small cracks (i counted two or three on the topside on a closer inspection), but i don't think it will snap off that soon, at least i hope so!
I believe the reason for the cracks it not so much because of the torque, but rather because i am using an 18T drive pulley whereas Gates recommends to not using less than 22T for all those belts. The Polychain GT Carbon is very stiff and hard to bend so it doesn't like small bending radius.
In the meantime i received a new rotor from Neumotor which was balanced in the factory together with the shaft.
It is running very smooth and almost all vibrations are gone. There is a slight oscillation at around 50-55kmh now where the motor is louder than usual, but otherwise it is many times better as it was before, and also the no-load consumption is a bit lower now -> less vibrations = less power wasted.
When i swapped the rotor also had to remount the "encoder disc" to the shaft. I hooked up the osci again and adjusted the Hall sensors to 0° timing as it was before.
When i did the Autodetect setup everything seemed fine. The controller also measured that angle_corr of 0° to be optimal, and RPM and no-load consumption was in the ballpark so you might assume that everything is OK, BUT it wasn't.
The motor did overheat very quick on the slightest grade.
Strange....
I did again Autodetect and oddly the controller now measured a different hall offset, and an angle_corr of +6° as the optimal setting now. Of course i always did manual tuning and measured RPM and no-load consumption, so this is very strange i don't understand the problem.
Strange...
Did i already mention that operation of Adaptto controllers is strange?
Than there is the problem with PWR timing, which needs to be adjusted if the battery voltage gets lower to prevent the so called "run away situation".
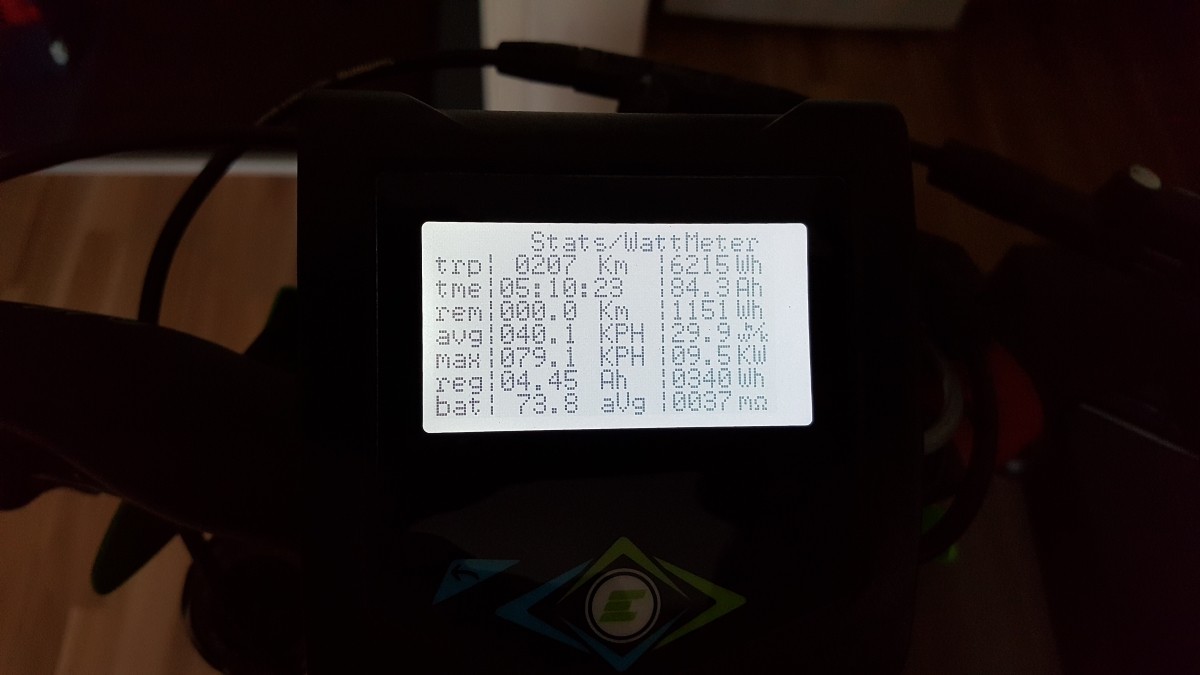
Now it is like that:
- when fully charged to 82V, a PWR_timing of 0,88 is optimal (no runaway and lowest heating under load).
- at 78V and less i need to adjust to the next lower setting which is 0,71 or so.
- below 72V there comes again the runaway situation and i need to adjust it further down to 0,53 in order to get the motor running smooth and efficient.
It also seems that IND_timing should be adjusted with the voltage (the lower, the higher the value as far as i found out).
I am already used to stop riding, do the adjustment and go on, but it is very annyoing and i still don't know if the motor even than is driven correctly or not.
I also noticed this problem when using Adaptto together with Hubmotors like MXUS or QS (as most Adaptto owners have), so there should be no problem with the Neumotor itself. The problem lies in the Controller.
The Neumotor with it's 18N16P design should be perfect fit for sine wave controllers as it has sine wave BEMF and torque curve, and on top of that also very low cogging torque.
district9prawn said:
Just read through this thread. Great job! I've been looking for a motor to do a rear wheel direct drive with regen and I think this will be it. For control I've been building an 18 fet vesc and am hoping to get it working with encoder.
Do you have a link to the controller?
----
The plans for the future
- looking for a different controller (thought about the 12F unit from VasiliSk which should be close to a Midi-E with 120A battery)
- now i have that one rotor (motor bell) as spare lying around, so i thought what could i do with it, and got the idea of doing full magnet segmentation (FMS) which would lower the no-load losses. Google that stuff if you are interested. It means you are using many small magnets instead of a single one in order to reduce the eddy currents in the magnets.
- another future idea (maybe over the winter month) is to rewind the motor to a lower kV. The reason for that is to get more inductance and more torque at same phase amps. I don't need so much topspeed, but would like to get more peak torque by not going up with the amps. More RPM can be always achieved with field weakening.