
I would seriously suggest increasing that to at least 95V, if not 100V. Even with your input caps, inductance in the battery wiring will induce voltage spikes far in excess of 84V when quickly reducing load.shaman said:Max is 84V(20s). That will be verified in testing. I'm assuming batteries will sag down a bit during high current loads. Calculating power at 75V loosely accounts for this.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Serious FOCer (84V VESC 6 based controller)
- Thread starter shaman
- Start date
shaman
1 kW
@1N4001
I'm talking about the voltage for calculating power transferred to the motor. That's not going to be calculated with the voltage of any spikes or transients.
I'm talking about the voltage for calculating power transferred to the motor. That's not going to be calculated with the voltage of any spikes or transients.
shaman
1 kW
qwerkus said:szomk (how to do pronounce the name?!?) is rather expensive
Actually they're one of the cheaper manufacturers of enclosures I've found that has reasonable MOQs for my situation. Did you check anything other than AliExpress? I bet getting a qoute from them directly on a an order of 100pcs or more yields something like $3 per unit or better.
shaman
1 kW
peters said:Will you publish your schematics? I'm wondering how you connect your gate driver and power supplies.
Yes. Though I'm not sure schematics alone will tell you how exactly I'm connecting things. What particular curiosities do you have surrounding the gate driver and power supply?

Still brainstorming the enclosure here. I've thought about this approach in the past but put it aside due to costs. It uses the heat sink plate and then has a plastic (ABS or Nylon) enclosure that slides/fits over it. It can have a lid if needed and also the connector panel. The problem is finding how to produce the plastic part at low quantity with decent costs. Injection molding requires a high MOQ just like custom extrusions. I've looked at one 3D printing service and the cost was something like $8 per unit fro ABS plastic at an order of 100. That's too high in my opinion but maybe other companies are cheaper.
Any ideas for this?
EDIT: I reoriented the model and couple of other things to make it more 3D printer friendly. Now quotes are between $3USD and $4USD for 100pcs which is more acceptable.
nieles
10 kW
i think he would like to know you you are going to connect the two pcb? the brain and power pcb.
atleast that is what i would like to know. (from the schematics)
how will you guarantee the solderjoint is made on both the top and bottom pcb? are all solder joints reachable from both top and bottom side of the stack? (so you can individually solder the top pcb from top side and vice versa)
also are you worried about solder wicking between the two pcb's? i have pondered the idea of making multi layer board from a stack of multiple pcb for the last few years, but never actually tried it.
mostly because i am afraid warping forces and other unforeseen things will ruin the controllers in the long run. or solder wicking between the two pcb's.
atleast that is what i would like to know. (from the schematics)
how will you guarantee the solderjoint is made on both the top and bottom pcb? are all solder joints reachable from both top and bottom side of the stack? (so you can individually solder the top pcb from top side and vice versa)
also are you worried about solder wicking between the two pcb's? i have pondered the idea of making multi layer board from a stack of multiple pcb for the last few years, but never actually tried it.
mostly because i am afraid warping forces and other unforeseen things will ruin the controllers in the long run. or solder wicking between the two pcb's.
shaman
1 kW
@nieles I guess I'll be the guinea pig. I'll keep yall updated if I find any problems making a PCB sandwich.
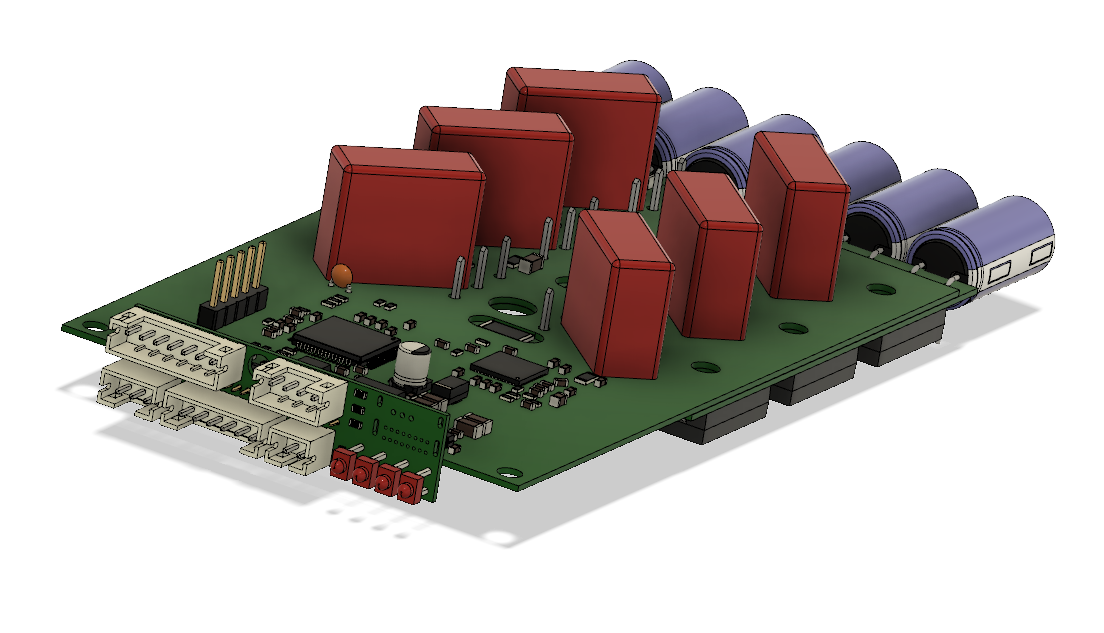
That's also interesting, but I just looked at the datasheet of DRV8353RS and interested in how you apply it. It requires max. 75V on the VM input, but your battery max is 84V, has an internal DC/DC converter that you probably use to supply the uC, but there is no inductor on your 3D view. Things like that.
shaman
1 kW
I'm using the DRV's built in buck converter to create 15V from Vbatt. That 15V is then powering VM. The inductor isn't in the model because KiCAD doesn't have a native 3D model for the footprint.
Right now I'm trying to tackle design challenges...not perfecting a 3D render. The renders so far are just for general concept. I'll add missing models toward the end of the development. It's just a cosmetic issue.
Right now I'm trying to tackle design challenges...not perfecting a 3D render. The renders so far are just for general concept. I'll add missing models toward the end of the development. It's just a cosmetic issue.
Any update on the ETA of an alpha version of the little focer or whatever will be its name ? I'm considering getting a few lishui controllers to experiment with stm32 platform, but I'd really rather invest that money in a few populated boards of your making ")
shaman
1 kW
@qwerkus I'm hoping to have beta units ready in September. The initial prototype(s) will be for my own testing. I'll be doing analysis in the lab just like with the Cheap FOCer. Then after this analysis and any adjustments to the design are made, I'll start looking for beta testers.
I'll need serious beta testers this time. There will be some high expectations from me for the beta testers. However in return for the trouble I'm probably going to provide the beta units at no cost to the tester.
I'll need serious beta testers this time. There will be some high expectations from me for the beta testers. However in return for the trouble I'm probably going to provide the beta units at no cost to the tester.
shaman said:@qwerkus I'm hoping to have beta units ready in September. The initial prototype(s) will be for my own testing. I'll be doing analysis in the lab just like with the Cheap FOCer. Then after this analysis and any adjustments to the design are made, I'll start looking for beta testers.
I'll need serious beta testers this time. There will be some high expectations from me for the beta testers. However in return for the trouble I'm probably going to provide the beta units at no cost to the tester.
Ok sounds doable. I don't have the equipment for hardware analysis, but I'm interested into working on the firmware asap. So if there are still design flaws, it doesn't really matter.
shaman
1 kW
Cool. Really what I'm looking for is field testing in application. The firmware won't need that much modification over the original VESC firmware to be compatible with my hardware. It's just minor tweaks to be compatible with the particular DRV I'm using. Anything else you want to do to the firmware on your own is fair game.
shaman said:Cool. Really what I'm looking for is field testing in application. The firmware won't need that much modification over the original VESC firmware to be compatible with my hardware. It's just minor tweaks to be compatible with the particular DRV I'm using. Anything else you want to do to the firmware on your own is fair game.
I'm not talking about compatibility with your hardware, but with standard ebike systems. What good would be a controller if we can't plug it to existing sensors / displays ? This might be irrelevant in NA where you can just plug in a throttle, but here in Europe, it's crucial, since throttle only bikes are illegal (you have to register it as a motorcycle). Currently investigating VESC code, and I see no easy way to implement a torque sensor and basic libraries for standard displays. And then there is sooooo much we just don't need for ebikes. I'm not sure I'm going to use the VESC as base; maybe the OS KT firmware is much closer to what we need. IN any case: much work, hence: the sooner I start the better the results!
shaman
1 kW
Ah yes I see what you mean now. Yeah the VESC stuff doesn't nativity support some of the common ebike stuff like PAS/PEDELEC, displays, ect like you were saying. I asked Benjamin if he planned to support this stuff but he doesn't seem interested.
The hardware is the there though. Display is probably just UART and code needs to be developed. there are also unused I/O pins on the STM32 that can be put to use.
I'm hoping that these standard ebike features can be integrated into my controller in the future. Maybe even do a pull request for the VESC Tool and firmware that will formally add support for all for all of this. I'll take all the help I can get in that regard!
The hardware is the there though. Display is probably just UART and code needs to be developed. there are also unused I/O pins on the STM32 that can be put to use.
I'm hoping that these standard ebike features can be integrated into my controller in the future. Maybe even do a pull request for the VESC Tool and firmware that will formally add support for all for all of this. I'll take all the help I can get in that regard!
nieles
10 kW
qwerkus said:shaman said:Cool. Really what I'm looking for is field testing in application. The firmware won't need that much modification over the original VESC firmware to be compatible with my hardware. It's just minor tweaks to be compatible with the particular DRV I'm using. Anything else you want to do to the firmware on your own is fair game.
I'm not talking about compatibility with your hardware, but with standard ebike systems. What good would be a controller if we can't plug it to existing sensors / displays ? This might be irrelevant in NA where you can just plug in a throttle, but here in Europe, it's crucial, since throttle only bikes are illegal (you have to register it as a motorcycle). Currently investigating VESC code, and I see no easy way to implement a torque sensor and basic libraries for standard displays. And then there is sooooo much we just don't need for ebikes. I'm not sure I'm going to use the VESC as base; maybe the OS KT firmware is much closer to what we need. IN any case: much work, hence: the sooner I start the better the results!
This shouldn't be too hard to add to the vesc. If I remember correctly Benjamin has some examples available how to make a custom application with his code at the base.
You will have to make some code modules to read out the sensor (pas/torque) and pass that information to the core vesc modules.
An other way to do it would be to make a "add-on" board. That reads the pas and torque sensors and translates this to canbus data. Then you configure the vesc as a "slave" canbus device.
Support for kt-display shouldn't be that hard to implement either. You will need make a code module that's running in the slow loop of the controller and spits out the correct data packages on a user.
shaman
1 kW
The modular nature of the existing code does allow for easy integration of new code. It wouldn't be hard for someone with embedded experience to do all this. I'm pretty rusty at it but I can still modify existing existing code to do my bidding.
I would attempt for the non-hardware solutions that wouldn't require add-on boards and such. There's already code for exporting display information. It gets transmitted through UART and then to whatever you want (like a BLE module).This is how the VESC App receives and displays data from your controller.
I would attempt for the non-hardware solutions that wouldn't require add-on boards and such. There's already code for exporting display information. It gets transmitted through UART and then to whatever you want (like a BLE module).This is how the VESC App receives and displays data from your controller.
BenMoore
100 mW
Excited about all this! I've been very impressed with the capabilities of the VESC but have been waiting on a high voltage version before building my next ebike and the Little FOCer would be just the ticket. Not concerned with enclosure issues personally as I will have my own custom version.
All power to this project!
All power to this project!
shaman
1 kW
Thanks @BenMoore! I'm working hard on this!
drdrs
1 W
- Joined
- Jun 10, 2018
- Messages
- 50
Thanks for all the work you are putting into this. It looks very promising.
I'm very interested in helping out with the Little FOCer beta testing. I've got a 10 Hz datalogging dashboard on my bike for my ASI 2000 and it should be straightforward to configure it to pull road data from this controller.
I'm very interested in helping out with the Little FOCer beta testing. I've got a 10 Hz datalogging dashboard on my bike for my ASI 2000 and it should be straightforward to configure it to pull road data from this controller.
shaman
1 kW
@drdrs
Sounds good! There are also different ways of monitoring and data logging VESC based controllers on your phone through Bluetooth. What is your battery voltage? I have a preference for those running 13s to 20s.
Sounds good! There are also different ways of monitoring and data logging VESC based controllers on your phone through Bluetooth. What is your battery voltage? I have a preference for those running 13s to 20s.
cheapcookie
100 W
- Joined
- Aug 2, 2014
- Messages
- 265
Hey, I am interested in a few of these puppies, what's the state of the project ?
cheapcookie
100 W
- Joined
- Aug 2, 2014
- Messages
- 265
cheapcookie said:Hey, I am interested in a few of these puppies, what's the state of the project ?
shaman
1 kW
cheapcookie said:Hey, I am interested in a few of these puppies, what's the state of the project ?
Still in design review. I keep coming up with different ways to skin this cat (engineering ADD) and then tossing those designs at @marcos to review. I'm hopefully on the last design revision that I'll do and annoy @marcos with.
For this latest design revision, think TI's booster packs and MSP430 combo. 2 boards connected over/under style with headers but mine is also mechanically reinforced with screws. That's all I'm sharing for now until I tease you guys with another shitty render.
Similar threads
- Replies
- 11
- Views
- 1,806
- Replies
- 55
- Views
- 14,027
- Replies
- 182
- Views
- 18,249
- Replies
- 66
- Views
- 12,545