j bjork
100 kW
Fw compensation= 100
Fw= 4000
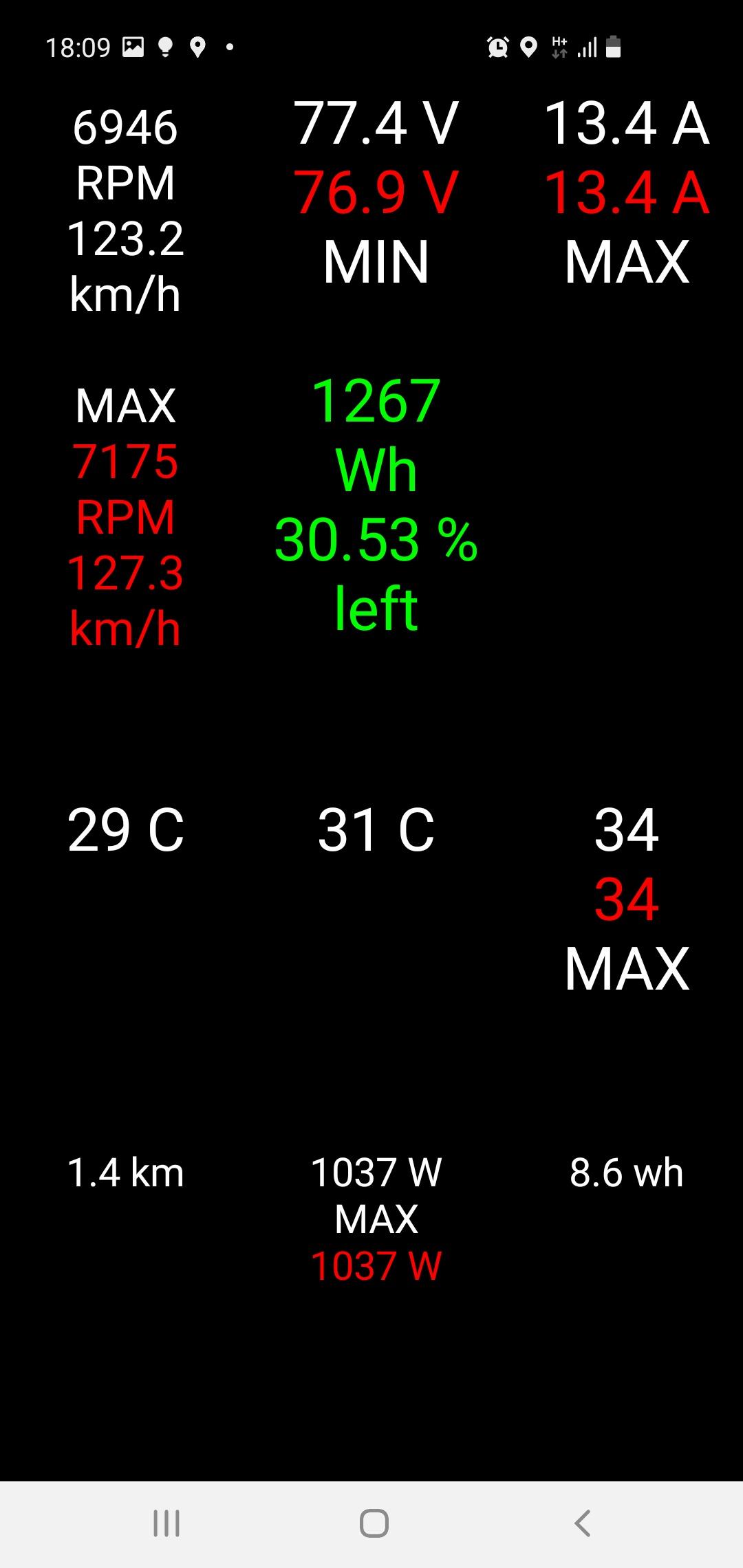
I easily hit 8000rpm no load, I havent tested how high it will go.
I dont know how high it would go under load either, this is about how fast I have driven it.
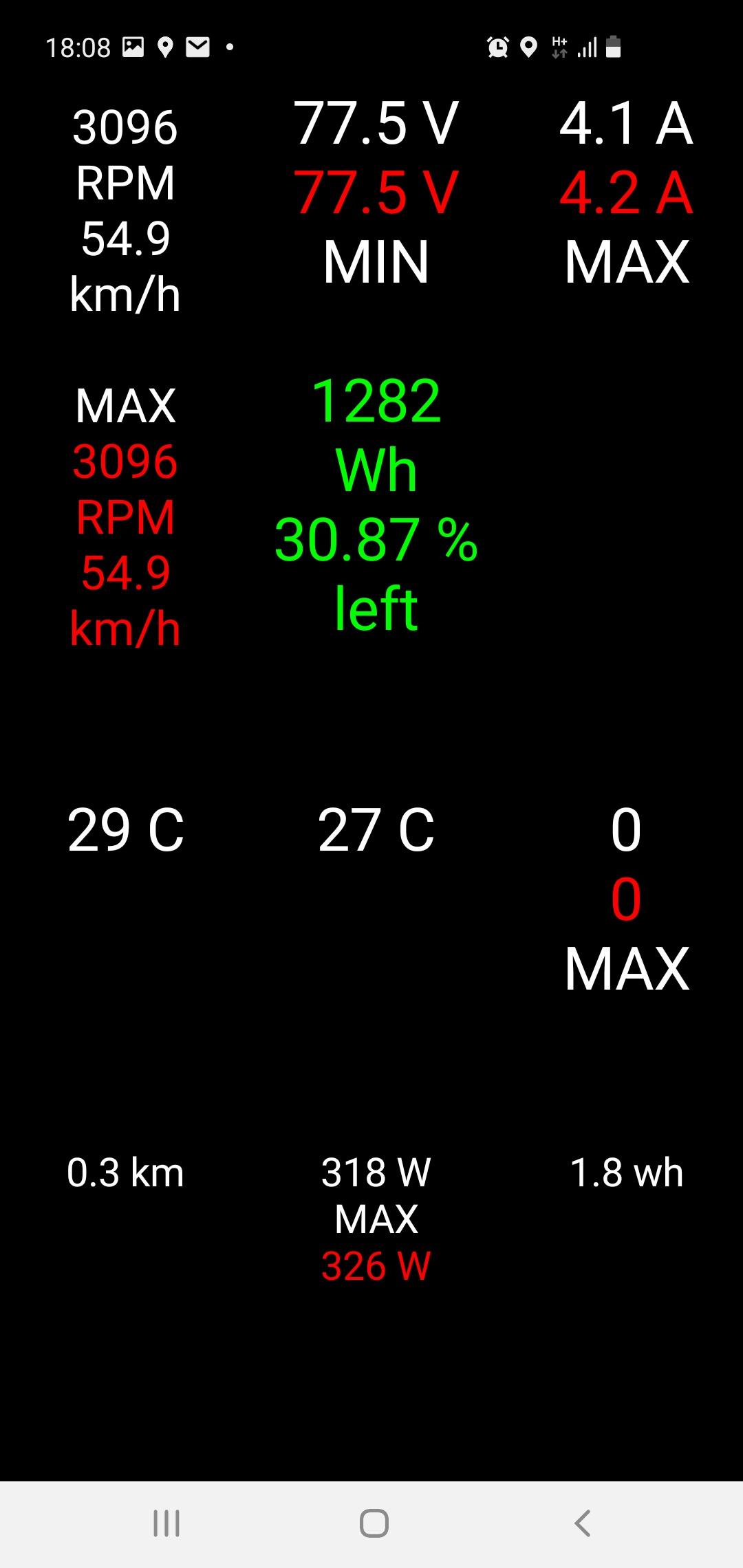
Some numbers:
Time; Volt; bA; Rpm; km/h; Tcont; Tmot; Tcoeff; Power; GPS
10:58:10;90.2;0.1;217;3.8;23;19;31;9;0 0;
10:58:10;87.8;73.4;1045;18.5;23;19;30;6445;0 0;
10:58:10;86.9;73.4;1720;30.5;23;19;32;6378;0 0;
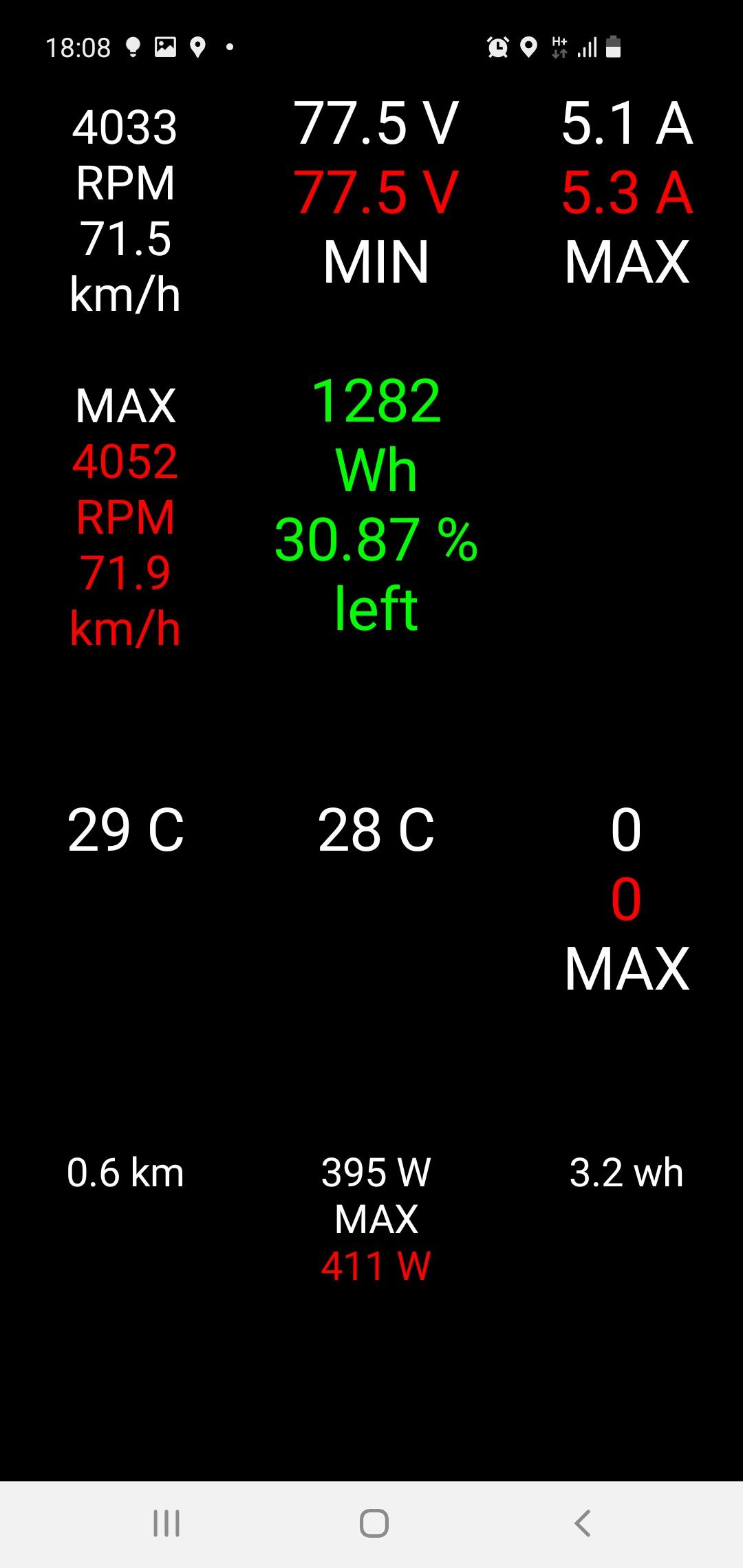
10:58:11;85.7;153.1;2543;45.1;23;19;32;13121;0 0;
10:58:11;84.3;214.4;3261;57.8;23;19;32;18074;0 0;
10:58:12;82.9;280.4;4100;72.7;23;19;18;23245;0 0;
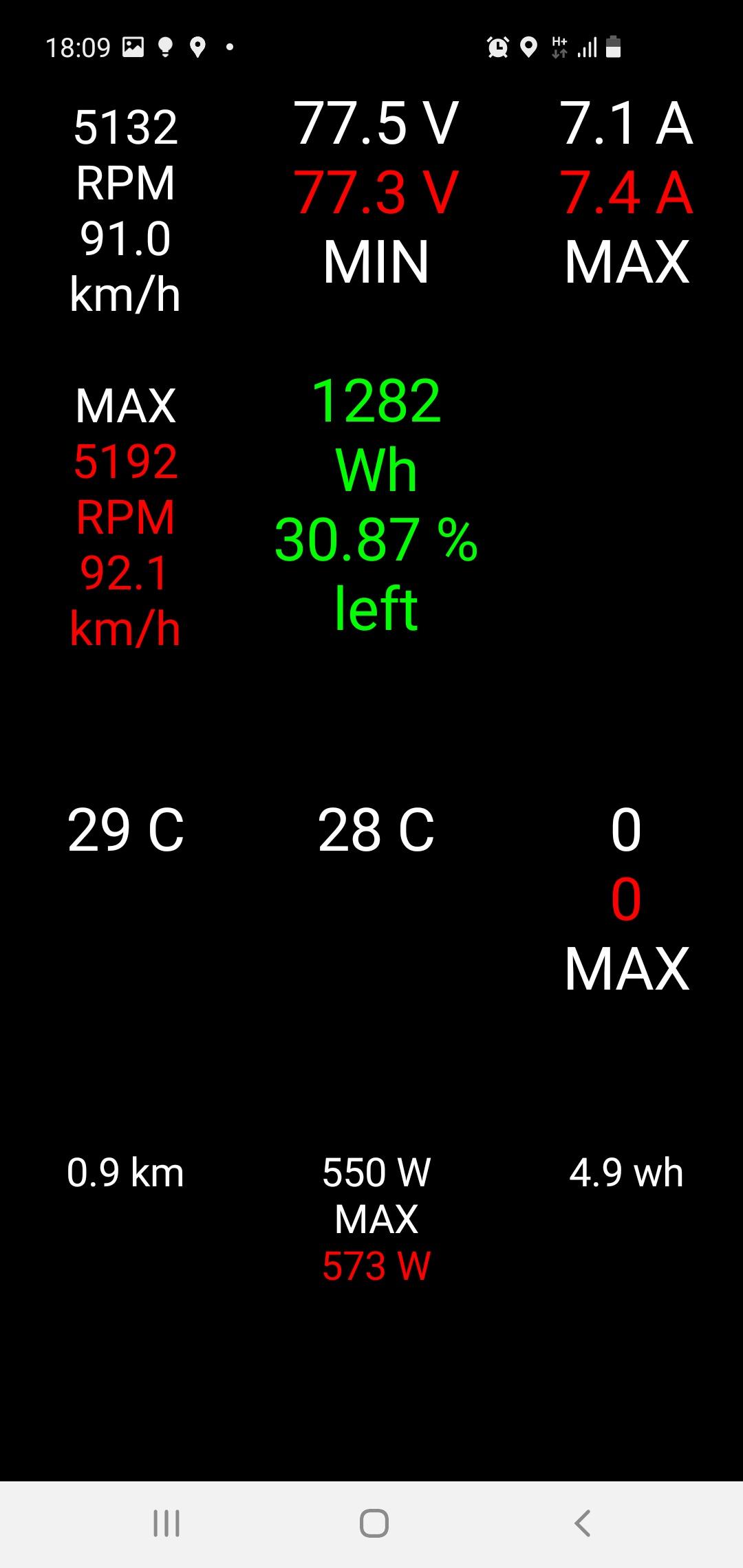
10:58:13;82.8;342.1;4627;82.1;23;19;7;28326;0 0;
10:58:13;82.6;358.7;5205;92.3;23;20;7;29629;0 0;
10:58:14;82.8;358;5575;98.9;23;20;7;29642;0 0;
10:58:14;82.7;351.9;5952;105.6;23;20;7;29102;0 0;
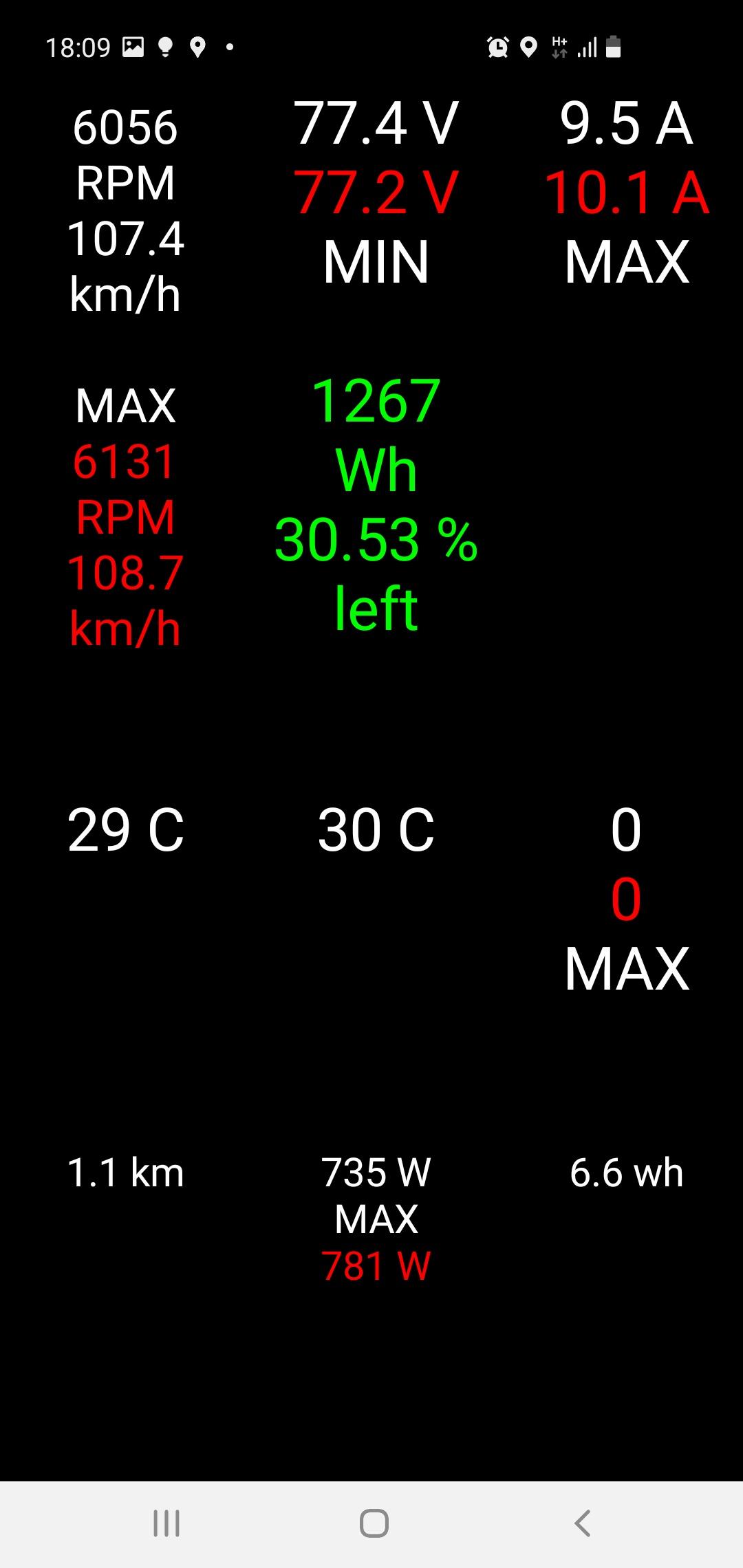
10:58:14;82.1;346.3;6264;111.1;23;20;7;28431;0 0;
10:58:15;82.1;347.9;6579;116.7;23;21;7;28563;0 0;
10:58:17;81.8;365.5;7300;129.5;23;27;6;29898;0 0;
10:58:18;89.4;361.1;6611;117.3;23;28;6;32282;0 0;
The speed numbers are wrong. It is set up for 7:1, and I have 8,181818:1 now.
It seems the top speed was slightly over 110kph when I recalculate.
But I think this tire is a little bigger than the old one, so it is probably not totally accurate anyway.
It seems like it did about 0-110 in about 7 seconds if I read the numbers right.
I also blew the start it seems, I was supposed to be stationary but it seems I was moving in 3kph.
I was actually surprised it pulled as hard as it did on high rpm, deep in to field wekening.
Fw= 4000
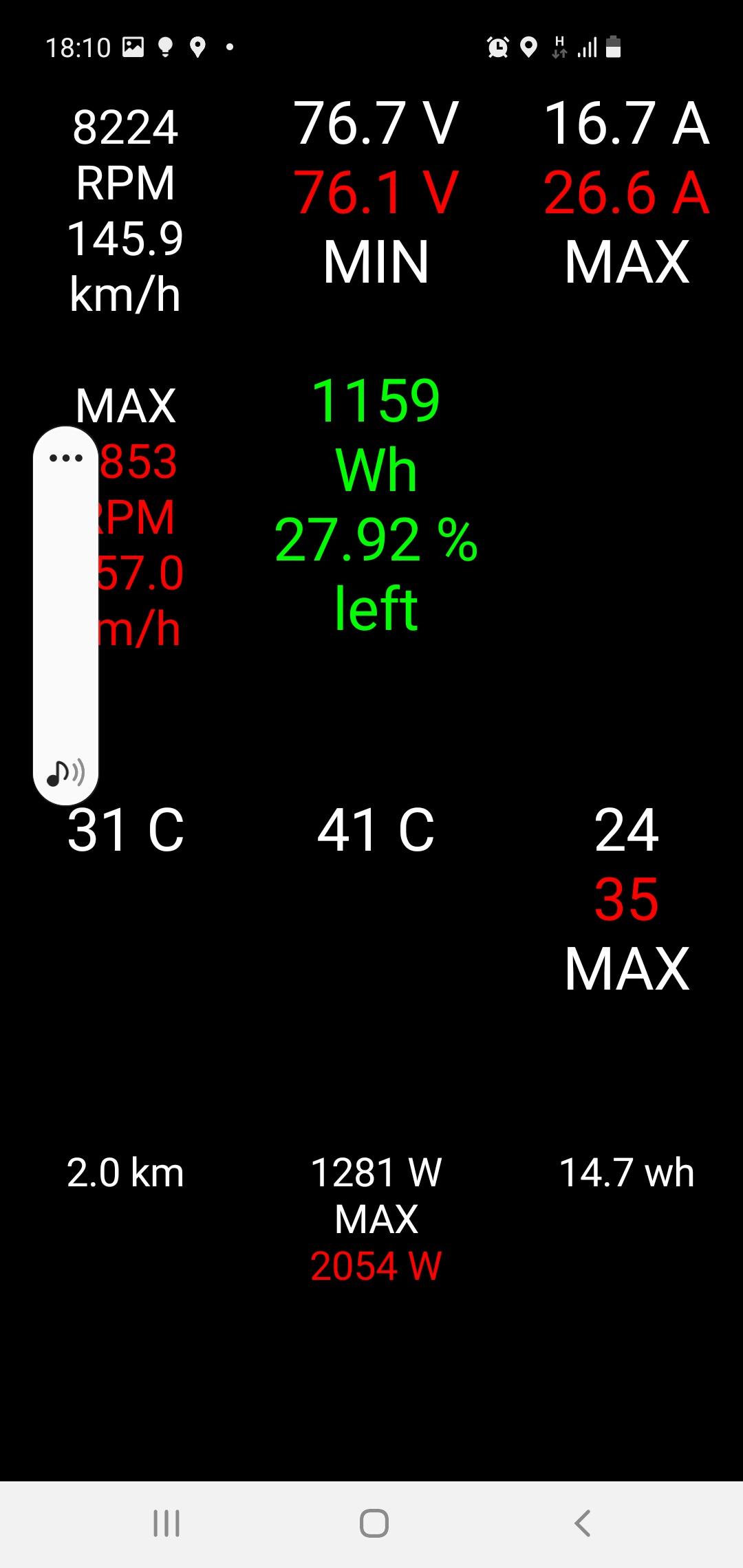
I easily hit 8000rpm no load, I havent tested how high it will go.
I dont know how high it would go under load either, this is about how fast I have driven it.
Some numbers:
Time; Volt; bA; Rpm; km/h; Tcont; Tmot; Tcoeff; Power; GPS
10:58:10;90.2;0.1;217;3.8;23;19;31;9;0 0;
10:58:10;87.8;73.4;1045;18.5;23;19;30;6445;0 0;
10:58:10;86.9;73.4;1720;30.5;23;19;32;6378;0 0;
10:58:11;85.7;153.1;2543;45.1;23;19;32;13121;0 0;
10:58:11;84.3;214.4;3261;57.8;23;19;32;18074;0 0;
10:58:12;82.9;280.4;4100;72.7;23;19;18;23245;0 0;
10:58:13;82.8;342.1;4627;82.1;23;19;7;28326;0 0;
10:58:13;82.6;358.7;5205;92.3;23;20;7;29629;0 0;
10:58:14;82.8;358;5575;98.9;23;20;7;29642;0 0;
10:58:14;82.7;351.9;5952;105.6;23;20;7;29102;0 0;
10:58:14;82.1;346.3;6264;111.1;23;20;7;28431;0 0;
10:58:15;82.1;347.9;6579;116.7;23;21;7;28563;0 0;
10:58:17;81.8;365.5;7300;129.5;23;27;6;29898;0 0;
10:58:18;89.4;361.1;6611;117.3;23;28;6;32282;0 0;
The speed numbers are wrong. It is set up for 7:1, and I have 8,181818:1 now.
It seems the top speed was slightly over 110kph when I recalculate.
But I think this tire is a little bigger than the old one, so it is probably not totally accurate anyway.
It seems like it did about 0-110 in about 7 seconds if I read the numbers right.
I also blew the start it seems, I was supposed to be stationary but it seems I was moving in 3kph.
I was actually surprised it pulled as hard as it did on high rpm, deep in to field wekening.
")