
I have a ND96530. Running a 24s battery which mean max voltage of 100.8V. Had to set nominal voltage to 79V in order to get over voltage protection to show 99.8V. They definitely have some serious series# to max voltage calculation issues. This now show my model # to be 79530.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Nanjing far driver controllers
- Thread starter j bjork
- Start date
Sattva Ram
100 W
- Joined
- Jan 4, 2020
- Messages
- 271
AdR said:I have a ND96530. Running a 24s battery which mean max voltage of 100.8V. Had to set nominal voltage to 79V in order to get over voltage protection to show 99.8V. They definitely have some serious series# to max voltage calculation issues. This now show my model # to be 79530.
Okay so nominal sets overvolt. The question is whether overvolt sets regen protect volt too...well i'll check it soon i guess...
Sattva Ram
100 W
- Joined
- Jan 4, 2020
- Messages
- 271
Yes regen worx. I select throttle realease in follow and set the desired back current. It was always good i didnt have to do any fancy shit. But if there is regen protect and it's tied to overvolt then it might be that. The votol sets regen protect 4 volt below overvolt. But at least you can change the value with votol and its extremely sophisticated for it very gradually does regen protect it's not like an on off switch. So i guess FD too sets regen protect like that only if overvolt could be set. And the sabvoton has an explicit regen protect field you can set. With this shit tho...who knows...
blackheartxix said:ebike11 said:I have a new fardriver watercooled heatsink if anyone is interested
for what model?
Sorry for the late reply...it fits on the 84V and 96V versions
credendario
100 µW
- Joined
- Aug 24, 2019
- Messages
- 7
hi all, sorry for my english
how do you activate the reverse?
I tried to connect the cable from pin 8 to 13 but it doesn't work
thank you
how do you activate the reverse?
I tried to connect the cable from pin 8 to 13 but it doesn't work
thank you
credendario said:hi all, sorry for my english
how do you activate the reverse?
I tried to connect the cable from pin 8 to 13 but it doesn't work
thank you
Hello guys, I'm new with FarDriver and have some doubts like @credendario. Please, let us know how to activate:
_ Reverse (mine is working at pin8).
_ Parking Switch.
_ SideStand.
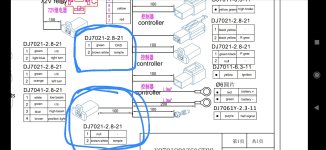
I have Siaecosys motorcycle harness, and some connectors unused (photo attached). Also 2 connectors (low brake and boost/cruise) unplugged.
Attachments

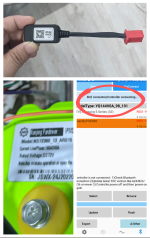
Make sure you aren't connecting to it via your phones Bluetooth settings. If your phone is connecting to it the app won't be able to.unisaco said:Hello, my Bluetooth Module cannot connect with Controller
Oclipper said:credendario said:hi all, sorry for my english
how do you activate the reverse?
I tried to connect the cable from pin 8 to 13 but it doesn't work
thank you
Hello guys, I'm new with FarDriver and have some doubts like @credendario. Please, let us know how to activate:
_ Reverse (mine is working at pin8).
_ Parking Switch.
_ SideStand.
I have Siaecosys motorcycle harness, and some connectors unused (photo attached). Also 2 connectors (low brake and boost/cruise) unplugged.
UPDATE: for side stand sensor, just short both yellow/green with black wire from low brake connector from controller
Attachments

peadar
100 W
hi all, wiring question for nd96850 do i need a charge resistor and do i connect controller negitive 96v to the 12volt negtive? my 8000w hub has a braidedsheild on the hall wires i figure it should be grounded?
thanks
thanks
ScrapRider
10 µW
- Joined
- Aug 28, 2022
- Messages
- 6
I have a 96530 controller with 5 bad mosfets that I have done a full tear down on and can’t seem to find the same mosfets to replace them. I would need to find someone who could do it for me anyway since I don’t have the equipment needed to change them.
They use Alpha and Omega N channel trench mosfets that are apparently new to market so haven’t been able to locate them. A similar but not exactly model is on eBay for over 20$ for 1 and it’s only rated for 40v.
The 96530 uses a 150v fet rated at 220a with rdson at .95 (crazy low) 30 fet controller.
I can try and post some pictures if anyone is interested. Probably not what you think, I was amazed by how little there actually is in there. It’s completely potted so it took me a while to remove everything and figure out how the boards come apart. Really impressed with the design though, 3 separate boards just stack together with the main mosfet board connected directly to the aluminum base. The mosfet board is an aluminum core pcb . Cool stuff for sure.
They use Alpha and Omega N channel trench mosfets that are apparently new to market so haven’t been able to locate them. A similar but not exactly model is on eBay for over 20$ for 1 and it’s only rated for 40v.
The 96530 uses a 150v fet rated at 220a with rdson at .95 (crazy low) 30 fet controller.
I can try and post some pictures if anyone is interested. Probably not what you think, I was amazed by how little there actually is in there. It’s completely potted so it took me a while to remove everything and figure out how the boards come apart. Really impressed with the design though, 3 separate boards just stack together with the main mosfet board connected directly to the aluminum base. The mosfet board is an aluminum core pcb . Cool stuff for sure.
ScrapRider
10 µW
- Joined
- Aug 28, 2022
- Messages
- 6
Correction on my post above. Rdson isn’t.95 it’s 4.5, I was looking at another mosfet data sheet and the 9650 uses the AOtl66518 mosfet. Just google it for the data sheet. I don’t know how to add files or pics yet.
ScrapRider said:I can try and post some pictures if anyone is interested.
Interested
JRP3
1 kW
ScrapRider said:Correction on my post above. Rdson isn’t.95 it’s 4.5, I was looking at another mosfet data sheet and the 9650 uses the AOtl66518 mosfet. Just google it for the data sheet. I don’t know how to add files or pics yet.
Click Attachments at the bottom and then Add files.
QSMOTOR
1 kW
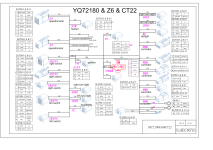
Hello,pls refer to attached file of self-learning about ND controllers.Hope it helps you.unisaco said:Does anyone how me about self Learn of ND, should we connect any wire ? Current when I press learn, just hear beep beep beep without motor rotation @@
Attachments
I done with self learn as well follow your guide
Many thanks ^^
Many thanks ^^
QSMOTOR said:Hello,pls refer to attached file of self-learning about ND controllers.Hope it helps you.unisaco said:Does anyone how me about self Learn of ND, should we connect any wire ? Current when I press learn, just hear beep beep beep without motor rotation @@
JRP3
1 kW
Maybe we can fix some of the language.QSMOTOR said:Hello,pls refer to attached file of self-learning about ND controllers.Hope it helps you.
1. The controller is connected to the motor and the wheels are overhead. "overhead" should read "off the ground"
2. Open the electric door lock and click self-learning on the upper computer.
I'm not sure what is meant by "open the electric door lock"?
3. Don't loosen the gas pedal, the motor starts to rotate, wait for the failure of the gas pedal to display and then release the gas pedal.
This is confusing but I think it means "Hold the gas pedal at full speed, the motor will rotate", but I don't know what the rest means as it seems to be contradicted by step 4. "release the gas pedal" is the opposite of step 4 "After the motor stops do not loosen the accelerator"
4. After the motor stops, do not loosen the accelerator. The motor starts to rotate in the opposite direction. After the accelerator pedal failure is displayed, release the accelerator.
What is meant by "accelerator pedal failure?
Hello, It just simply take the wheel off the ground, turn on your ND, going to android app, at tab Graph select AutoLearn, ND will sound beep beep beep ..., at that time turn max throttle and wait -> the wheel will run fastly a moment, then auto run reverse (still hold max throttle at this time) -> then motor stop and app show Throttle Error and sound beep -> Done self learn -> turn off and turn on key again and enjoy
JRP3 said:Maybe we can fix some of the language.QSMOTOR said:Hello,pls refer to attached file of self-learning about ND controllers.Hope it helps you.
1. The controller is connected to the motor and the wheels are overhead. "overhead" should read "off the ground"
2. Open the electric door lock and click self-learning on the upper computer.
I'm not sure what is meant by "open the electric door lock"?
3. Don't loosen the gas pedal, the motor starts to rotate, wait for the failure of the gas pedal to display and then release the gas pedal.
This is confusing but I think it means "Hold the gas pedal at full speed, the motor will rotate", but I don't know what the rest means as it seems to be contradicted by step 4. "release the gas pedal" is the opposite of step 4 "After the motor stops do not loosen the accelerator"
4. After the motor stops, do not loosen the accelerator. The motor starts to rotate in the opposite direction. After the accelerator pedal failure is displayed, release the accelerator.
What is meant by "accelerator pedal failure?
Does anyone face issue with cruise function like my case ? Cruise work well and stop cruise ok when I press low break or push cruise button again. But when I want to go out cruise by turn the throttle, the wheel suddently increase max speed like going to boost function
JRP3
1 kW
unisaco said:Hello, It just simply take the wheel off the ground, turn on your ND, going to android app, at tab Graph select AutoLearn, ND will sound beep beep beep ..., at that time turn max throttle and wait -> the wheel will run fastly a moment, then auto run reverse (still hold max throttle at this time) -> then motor stop and app show Throttle Error and sound beep -> Done self learn -> turn off and turn on key again and enjoy
3. Don't loosen the gas pedal, the motor starts to rotate, wait for the failure of
the gas pedal to display and then release the gas pedal.
4. After the motor stops, do not loosen the accelerator. The motor starts to
rotate in the opposite direction. After the accelerator pedal failure is displayed,
release the accelerator.
So these two instructions should really be simplified to something like this:
3. Apply full accelerator until motor spins, changes direction, stops, and beeps, then release accelerator and turn off controller.
j bjork
1 MW
dominik h said:ScrapRider said:I can try and post some pictures if anyone is interested.
Interested
Me too
")
In sport mode 
unisaco said:Does anyone face issue with cruise function like my case ? Cruise work well and stop cruise ok when I press low break or push cruise button again. But when I want to go out cruise by turn the throttle, the wheel suddently increase max speed like going to boost function