Hello
Story:
Last year i moded a brushed 500w PB batteries kick scooter into a lithium bldc ride.
I bought a cheap 48v 2000w kit from Vevor. (I think it is same as Kunway.)
I made a 14s6p pack of 18650 3Ah 2.5c cells and connected everything to work fine with it including hall sensors.
Acceleration results are geat (A lot faster and torquier than before) but cruising and low speed riding isn't. The controler feel like if it is set for speed target rather than targetting torque. (Small throttle input makes heavy acceleration to reach that low speed as quick as possible rather than reducing torque.)
I tryied the 3 speed switches, 2-3 different throttle and even adding resistors to find a way to make it smoother without any success.
The cheap controler is similar to the one of low cost e-bike kit and doesn't look programmable. (Square aluminium box with fet bolted on the side and a bunch of wires in just 1 end).
I ended up looking for a replacement controler that can be programmed for a smoother ride and i would also like to have flux weakening to gain top end speed without reducing low end torque to climb a hill.
Space is limited but i could fit a EM50-4 in there.
Why Votol? because i have a EM200 in hands for another project and i'm assuming if i can make it work with the EM200, i can buy a EM-50-4 without any risk of non compatibility. (The EM200 is from a kit with a QS138 V3 that i bought for a later E-motorcycle project into a Yamaha 1977 frame...)
The EM200 look to be factory set to fit the QS138 V3 motor and that combo worked great when tested unloaded.
-I lowered the voltage setting on the controller to fit my 14S pack and let everything else as per factory. (I don't want to lose the match for the QS138)
-I successfully paired the hall sensors of the small veyvor motor to the EM200 controller. (Color was almost matching so it was easy)
-I temporary connected the controls of the E-motorcycle to test the controler on the kick scooter. (Motor is mid size chain driven to the rear wheel. Wheel is up in the air for testing purpose)
When i slowly increase throtle it start correctly so i expect phase angles and polarity is ok but it start to jerk, when i push the throttle further.
I measured the RPM and it reach faster speed at part throtle than it was going on it's own controler before reaching the point where it start to jerk. This is driving me to believe that flux weakening might be the problem.
Question:
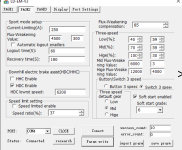
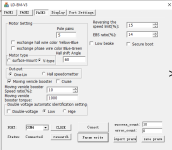
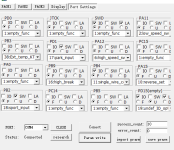
Information on Votol controlers seem hard to find. Just to figure out the wiring diagram took me some time and the website manual is not giving much infos about it. I could try some values without any clue but i don't even know if i need to reduce or increase the number to limit the flux weakening.
Is anyone here more familiar with those controlers and could help me understand how flux weakening parameters works ?
Can the fact that the controler is 4-5time more powerfull than my motor make the readigs to go nuts because the signal isn't strong enough ?
Can the test with the wheel in the air affect the results ? The load is small and chain backlash may return an oscillating current feedback...? I'm afraid to try it on the ground because when it start to jerk, it keep going when i let off the throtle, i have to stop the controler to stop it.
thanks
Story:
Last year i moded a brushed 500w PB batteries kick scooter into a lithium bldc ride.
I bought a cheap 48v 2000w kit from Vevor. (I think it is same as Kunway.)
I made a 14s6p pack of 18650 3Ah 2.5c cells and connected everything to work fine with it including hall sensors.
Acceleration results are geat (A lot faster and torquier than before) but cruising and low speed riding isn't. The controler feel like if it is set for speed target rather than targetting torque. (Small throttle input makes heavy acceleration to reach that low speed as quick as possible rather than reducing torque.)
I tryied the 3 speed switches, 2-3 different throttle and even adding resistors to find a way to make it smoother without any success.
The cheap controler is similar to the one of low cost e-bike kit and doesn't look programmable. (Square aluminium box with fet bolted on the side and a bunch of wires in just 1 end).
I ended up looking for a replacement controler that can be programmed for a smoother ride and i would also like to have flux weakening to gain top end speed without reducing low end torque to climb a hill.
Space is limited but i could fit a EM50-4 in there.
Why Votol? because i have a EM200 in hands for another project and i'm assuming if i can make it work with the EM200, i can buy a EM-50-4 without any risk of non compatibility. (The EM200 is from a kit with a QS138 V3 that i bought for a later E-motorcycle project into a Yamaha 1977 frame...)
The EM200 look to be factory set to fit the QS138 V3 motor and that combo worked great when tested unloaded.
-I lowered the voltage setting on the controller to fit my 14S pack and let everything else as per factory. (I don't want to lose the match for the QS138)
-I successfully paired the hall sensors of the small veyvor motor to the EM200 controller. (Color was almost matching so it was easy)
-I temporary connected the controls of the E-motorcycle to test the controler on the kick scooter. (Motor is mid size chain driven to the rear wheel. Wheel is up in the air for testing purpose)
When i slowly increase throtle it start correctly so i expect phase angles and polarity is ok but it start to jerk, when i push the throttle further.
I measured the RPM and it reach faster speed at part throtle than it was going on it's own controler before reaching the point where it start to jerk. This is driving me to believe that flux weakening might be the problem.
Question:
Information on Votol controlers seem hard to find. Just to figure out the wiring diagram took me some time and the website manual is not giving much infos about it. I could try some values without any clue but i don't even know if i need to reduce or increase the number to limit the flux weakening.
Is anyone here more familiar with those controlers and could help me understand how flux weakening parameters works ?
Can the fact that the controler is 4-5time more powerfull than my motor make the readigs to go nuts because the signal isn't strong enough ?
Can the test with the wheel in the air affect the results ? The load is small and chain backlash may return an oscillating current feedback...? I'm afraid to try it on the ground because when it start to jerk, it keep going when i let off the throtle, i have to stop the controler to stop it.
thanks