C_Marvin
1 µW
Hi all!
New here and new to BLDC vehicles...Hopefully I'm posting in the right place!
I'm working on designing a "pay-out" paragliding winch that will use regenerative braking to control tension.
Main setup for a paragliding payout winch:
Winch design:
My main questions:
Thanks so much in advance! I've already learned so much just browsing through all the information and knowledge posted here on the forum
New here and new to BLDC vehicles...Hopefully I'm posting in the right place!
I'm working on designing a "pay-out" paragliding winch that will use regenerative braking to control tension.
Main setup for a paragliding payout winch:
- Lots of line is wrapped around a drum, attached to the back of a car
- The end of the line is attached to the pilot
- the car starts driving, then increases tension on the line to a pre-set tension, towing the glider into the sky (the tow up takes about 6-7 minutes)
- at the end of the tow, the pilot disconnects and a drogue chute inflates at the end of the line
- the motor on the winch then rewinds the line
- video link:https://www.youtube.com/watch?v=qMrnE9xFzgw
Winch design:
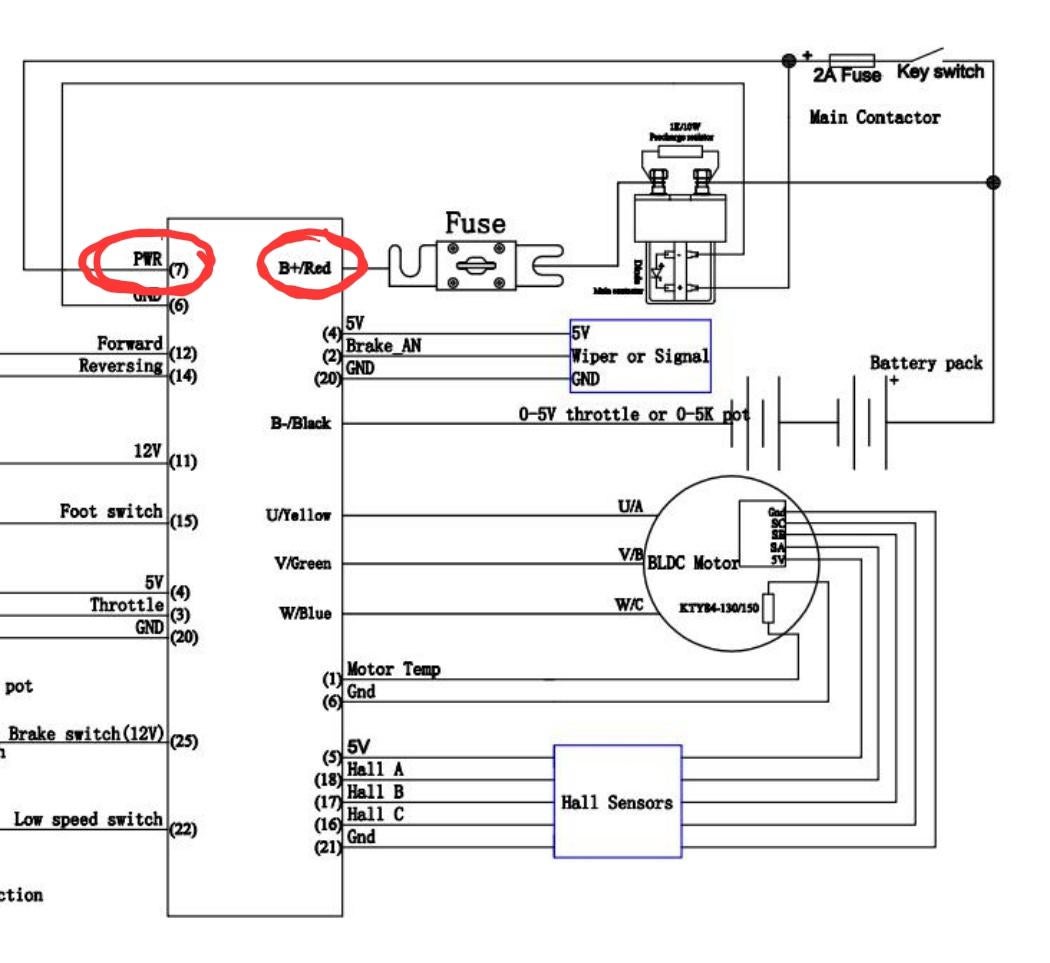
- I'm planning on using a qs138 70H paired with a Kelly KLS7230H
- The winch drum will be an average of ~15" in diameter, so we're using about a 9:1 gear reduction to spin the motor at ~1600RPM during the payout, placing the motor in the "efficient" range of RPMs per the performance curve
- during payout, the maximum line tension that will be created by regen braking is ~60kg, translating to ~12Nm of torque at the motor with the gear reduction
- We plan to dump most of the regenerative braking energy into a resistive heating element with air cooling to avoid needing a huge battery that can handle the regen currents. Then we're planning on just using a couple 80v 4Ah power tool batteries in parallel for rewind.
My main questions:
- If the pilot screws up and starts flying the wrong way on tow, the tow operator will need to remove all tension from the line, and the motor may end up spinning quite fast as the pilot pulls the line out (faster than the rated no-load speed of ~6000RPM of the qs138) ...Since motor RPM is tied to voltage via the kV rating, what will happen in this scenario? Will the motor controller burn out? will the motor overheat? will the motor start applying force to the line even if we drop the regen braking to zero?
- Anything I'm missing here with this design? Any design points I'm missing?
- I would love to do a belt drive, but I can't find a belt pulley with enough teeth to give me at least a 8:1 gear ratio...Any hints on where to find one, or do people just diy them?
Thanks so much in advance! I've already learned so much just browsing through all the information and knowledge posted here on the forum