coleasterling said:
Have you been able to figure out a thermal limit? Looks like there's not much advantage to going with higher voltage due to the already high rpm's, just means more gearing. How long could it do double or even triple the current you're using now at, say, 30% duty?
Thermal limit: at 35 phase amps the motor got pretty toasty on the dyno stand, so I'd say this is a pretty solid limit. On the dyno stand we were only running about 30% duty cycle so I'd say 35 phase amps is a pretty hard max.
In regards to increasing the volts, your assumption that more volts = more RPM is not entirely correct. The motor only reaches 16,000 RPM due to the fact that I am doing a ton of field weakening. Without field weakening, the motor tops out at about 6500 RPM. After this, I use field weakening to keep the motor spinning, but this causes a huge dropoff in torque.
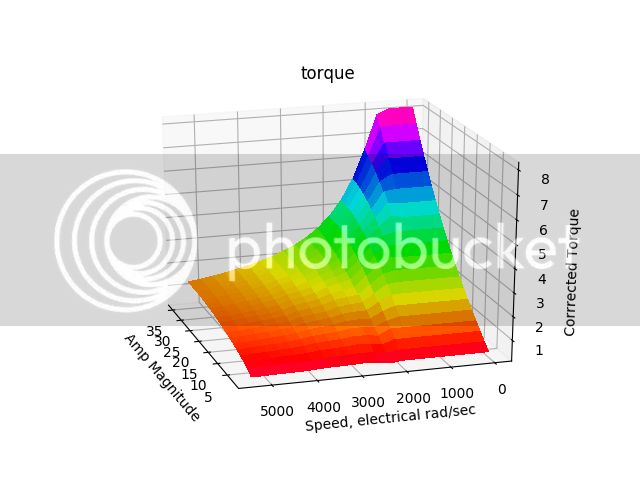
Here is a simulated torque surface running at 150 volts on a maximum of 35 phase amps, up to 50mph. Notice how torque is only high for the lower ~20% of the speed range, and afterwards torque drops off pretty quickly.
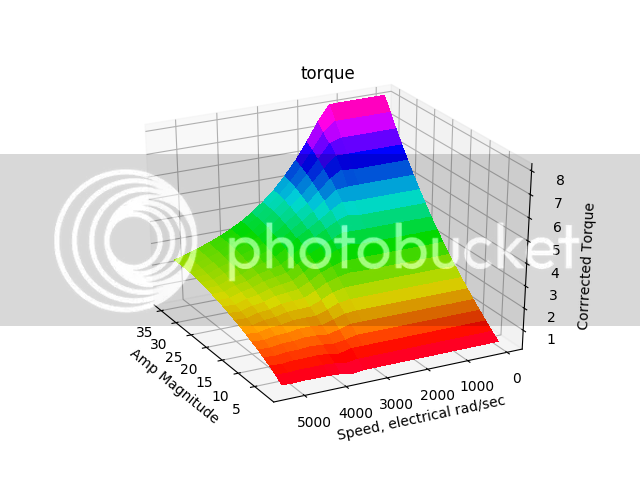
Here is the same torque curve but with a bus votlage of 250 volts instead of 150. Notice how the torque remains high for a little longer, and also how the torque at higher speeds is vastly improved.
We always think that volts = speed and current = torque, but this is not always true with regards to IPM motors. What is going on here is that to achieve high speed at a battery voltage of only 150 volts, the controller has to field weaken *really* hard to get to high speeds. This means that torque at high speed is exceedingly poor. When you increase the bus voltage, the controller has to field weaken less hard, and can therefore put more of the amps into producing torque.