liveforphysics
100 TW
Holy shit! That bionix motor looks awesome! Do you have specs on it?
flathill said:Miles, can you sim a magic pie as a comparision to set the baseline if we can gather the dimensions?
Anyone know the weight of a magic pie with no controller? Are the side covers steel or al?
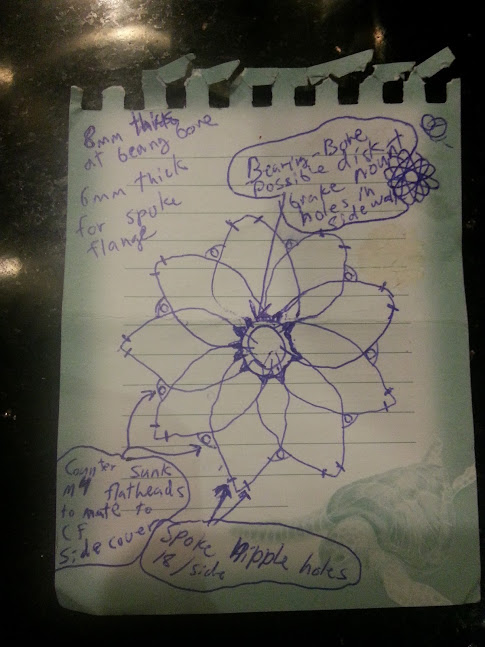
Luke, can you sketch your spoke idea? Some solar car motors have side covers like that but no spokes
https://www.emetor.com/pricing/flathill said:Nice work! How much did that cost you to run? Just curious
I don't know about that but I was thinking the same....JennyB said:This may be mad.......
honestly, you think you're gonna invent a better wheel that's had invested millions of dollars & thousands of man-hours with math PhD's working on it?
or is it simpler to spend the extra bux & face the music of how dumb you are for doing so?
 Lots of ways to better the status quo. May not be as pretty, have marketing budgets or ever make a dime, but better toward our goals, for certain. It is obvious that you have experience, and could contribute, but if not able to do it within the basic rules of the process, please stay out of this.
Lots of ways to better the status quo. May not be as pretty, have marketing budgets or ever make a dime, but better toward our goals, for certain. It is obvious that you have experience, and could contribute, but if not able to do it within the basic rules of the process, please stay out of this.Punx0r said:Can't find much in the way of a specification for that Bionix D-series motor.
the single press release already posted, that's it to date.Toorbough ULL-Zeveigh said:that's all there is by way of specs.
oh, if only i could.speedmd said:if not able to do it within the basic rules of the process, please stay out of this.

I think that a rough maximum price should be an agreed upon parameter.
I've got a neat concept for a pair of spoke flange/bearing holder side plates. Thinking a 4" flange, and sized to work correctly with proper sized thin strong bicycle spokes. We can do a FEA stress model optimized cutout webbing pattern
Yes it would. Super bike territory.Taking the extreme mention, the power of a 400mm x 80mm motor would be crazy
No, Kt will increase, pretty much proporionately, with the stator width, if the turn count is kept constant.Punx0r said:I could be wrong, but I believe growing the stator width will simply mean more torque, with KV staying about the same.