Well, I didn't read the entire thread just skimmed but I think I get the basics of the thread. Single gear ratio drive vs. multi ratio drive. My take on the whole discussion is pretty clear at least in my mind:
First of all, adding multiple gears may or may not decrease the mechanical efficiency of the drive. If the drive is not direct drive in the first place (direct drive wheel hub-motor or similar) then you have to go through some sort of mechanical gearing ratio change anyway. Gear box, chain drive, belt, and/shaft drive you usually have to use something unless your putting the motor right in the wheel. Adding multi gearing ratios to that combination may or may not decrease the efficiency and if so not by much, a good example is the multiple sprockets and chain-rings on a mountain bike with a derailer system. Still the same chain running between two sprockets, the only additional drag in the system being in the two idler sprockets in the rear derailer arm and the condition of the chain makes more difference to the efficiency then the small drag in the two idler sprockets at least if their bearings are in decent condition. So, yes, adding multi ratio capacity to the drive system can certainly decrease the mechanical efficiency but the provided its done correctly its marginal.
Secondly, lets talk electric motors, in my opinion a whole lot of people are abusing their motors. Certainly if you allow unlimited current on the motor end of the controller you can get impressive amounts of torque in an electric motors bottom end but by doing so you are literally using your motor as a self destructing electric heater that is heating itself at its core potentially to damaging levels if allowed to do so for any extended period of time. Next the motor is running at incredibly bad efficiency levels at its bottom end even if it does have the torque. At a dead stall an electric motor has exactly 0% efficiency with 100% waste in the system. Even running your transmission dry without lubrication your going to get better then 0% efficiency and you don't have to drag a motor down into its lower RPM range very far to get some pretty nasty efficiency levels. For example a 3-Kw scooter hub motor I've got a specs sheet for that has an 85-87% efficiency when it is in its top end power and efficiency range in the 410-510 RPM range but if you drag the RPM numbers down to 300 RPM by loading the motor down the efficiency drops
below 50%. That means that over half the power your putting into the motor is just heating the darn thing up trying to burn itself out not to mention that this also means that if you climbing a hill and your speed gets dragged down as a result so that the motors RPM is reduced to that level then you now have less then 1.5Kw of usable power to help you climb the hill not the full power available from the motor which is better then 2.5Kw of usable power at the road contact surface after you account for the motors efficiency when its running in its efficient RPM range and hasn't been dragged down too low. Even if you build a transmission between that motor and wheel that only has a 70% mechanical efficiency (a very bad inefficient design) you will still come out ahead of the game and have a better overall efficiency and more power at the wheel when climbing that hill then if you are running the motor direct drive.
Long story short, if all you care about is the performance at top speed and he aren't ever intending to climb a hill or fight a headwind then, yes, going direct drive with no multi drive ratio capabilities is your best bet for maximum efficiency. But if you happen to live in the real world where there are these things called hills and this thing called wind and you want to be able to deal with them effectively for a small reduction in your top end performance then having a multi speed transmission (or more correctly a multi drive ratio transmission, speed really hasn't much to do with it, its a matter of loading).
Here are some spreadsheet calculations I did a few days ago that shows the difference in performance between a single ratio direct drive ea-bike and a 3-speed (three front chain-rings with front derailer only with no rear gear spool eliminating the inefficient and easily damaged rear derailer arm and replacing it with a single large diameter tension idler mounted half way back on the chain stay gently pushing up into the bottom of the chain loop to keep its tension and keep it higher up out of the road grime and improve the over-all chain geometry with more contact arc on both the rear sprocket and front chain rings) ea-bike using the exact same motor with the exact same motor specs on the exact same bike under the exact same sets of conditions with the only difference being one is single ratio (more commonly called single speed) drive and the other has three selectable drive ratios via the front chain rings with a chain tensioner.
I did take into consideration the inefficiency of the gearing setting the mechanical efficiency of the large reduction (13.5:1) double stage roller chain reduction between the motor and the crank at a total cumulative 90% with the main chain driving at 98% efficiency due to the improved tensioning mechanism using only the three front chain rings for gears since the front derailer only adds drag and inefficiency when changing gears and none otherwise. These are realistic figures for quality well lubricated off the shelf bicycle components.
I set three different test conditions, first set is climbing a 5% grade hill with an extra 40lbs of cargo weight on the bike, second set is climbing a 1% grade against a 10mph head wind, third set is running flat with no extra cargo weight or a head wind or tail wind.
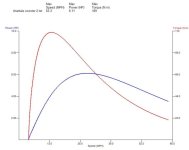
I did open up the motor side current limit on the controller to 30A on the direct drive bike in the spreadsheet simulation instead of the 17.5A motor side limit I normally have on this motor with a 15A battery side current limit. Setting a limit on the motor side of the current as well as the battery side is really a nice thing to do so as not to torture your motor in the lower end where you get current multiplication due to the reduced RPMs but it also limits its torque in the low end and I had to raise the limit for the direct drive otherwise it wouldn't even climb the hill in the first set of conditions:
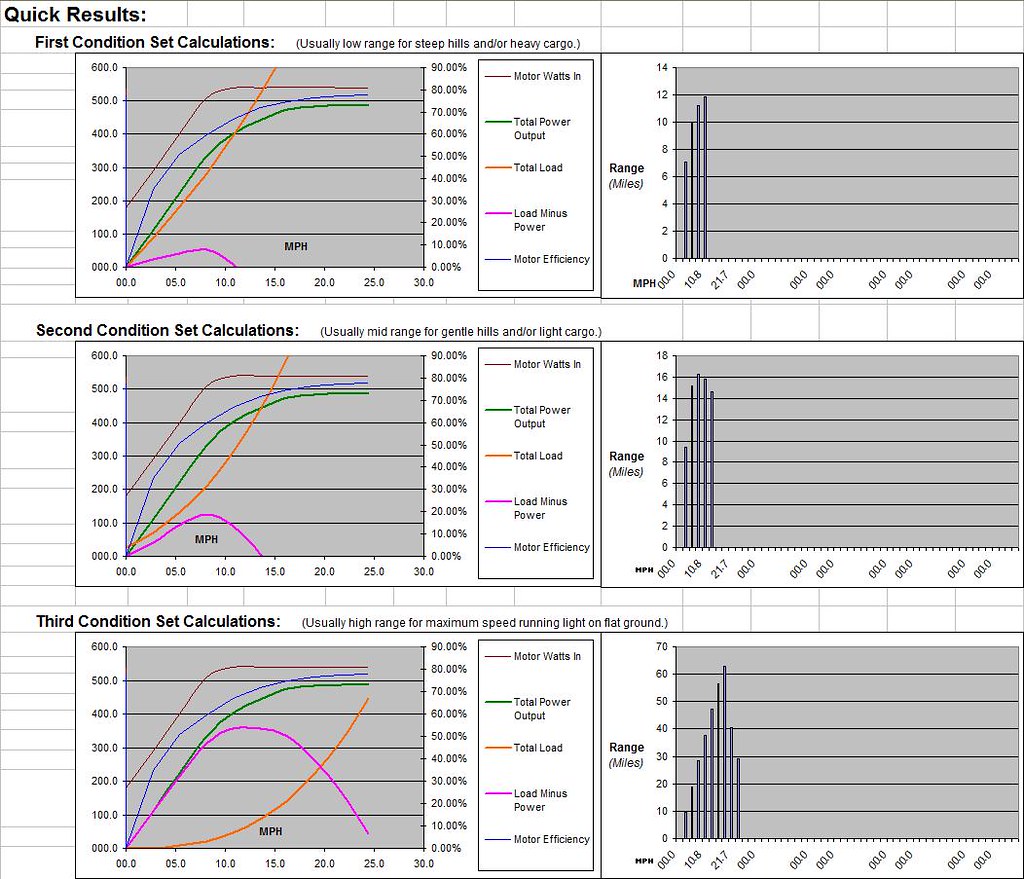
Single Drive Ratio (1:4.5 motor ratio, 3:1 pedal drive) =
Three Drive Ratios (1:8, 1:6, & 1:4.5 motor ratios, 1.6875, 2.25:1, & 3:1 pedal drive) =
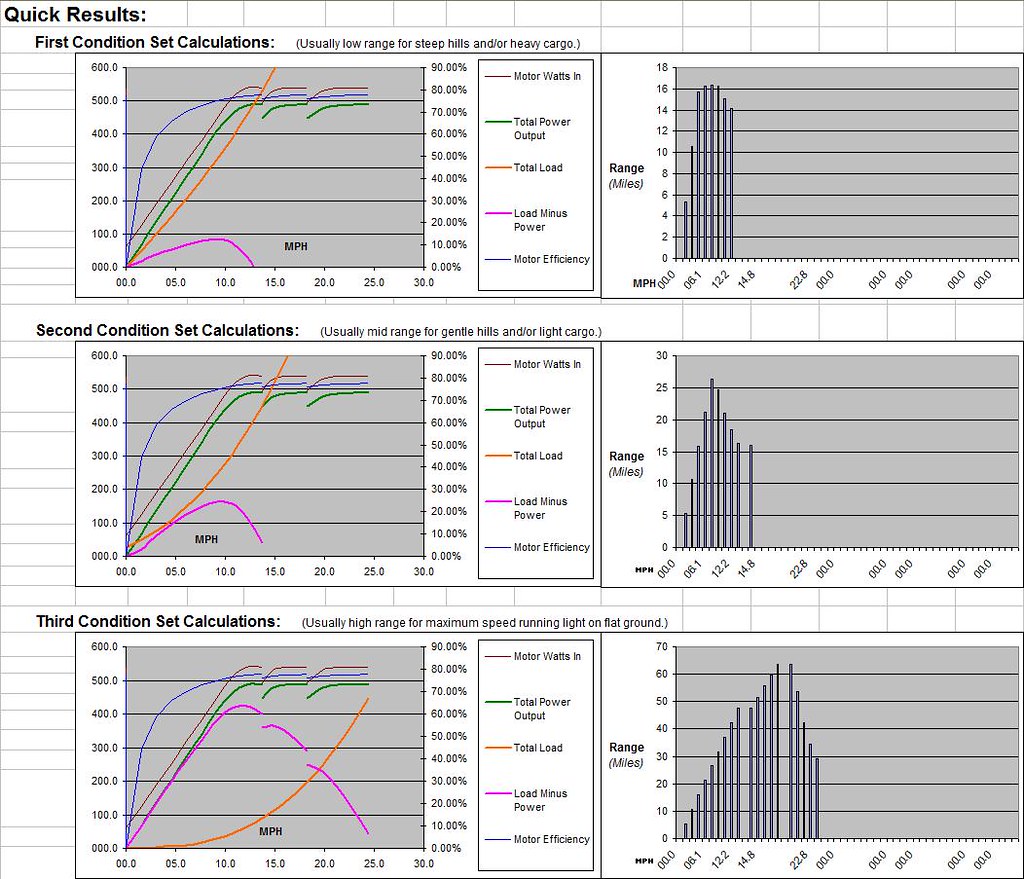
As you can see by both the increased speed and the increased peak "sweet spot" range results for the first two situations having just three drive ratios instead of only one greatly improves the performance when climbing hills and bucking head winds. It does so by keeping the motor in its higher efficiency range more of the time and not having it get dragged down into the very inefficient bottom part of its RPM range. Granted the top end performance and range are not reduced in that simulation due to the fact that I was simulating a situation where I had to use a mechanical gear box with its mechanical inefficiencies to gear down the motor to the wheel anyway so I wasn't adding any noticeable inefficiencies to the system by simply having three different drive sprockets for the motor available. A little extra weight yes, but nothing beyond that. With higher power more complicated builds obviously that isn't always the case especially if we are talking an automobile type transmission, especially an automatic hydrolic type which usually can't even come close to touching anything above 80% efficiency even in the best of circumstances so obviously something of that scale where we aren't talking just moving a chain around on different sprockets with a front only derailer assembly where the only added constant inefficiency is in a single chain tensioner idler sprocket mounted mid-way on the chain stay pushing gently up into the bottom of the chain to hold its tension, that's a small price to pay for having the smaller chain rings available to have the lower gearing ratios for climbing hills and bucking headwinds to much better effect.
The over all results get even better with only a small decrease in the flat land, no wind, no extra cargo "sweet spot" range if you run the calculations for a full set of gears including a rear derailer and rear gear spool as well as the front chain rings. I've got those calculations as well but I don't have them for this same motor as I used for the single speed cross comparison so it wouldn't be an apples to oranges comparison to include them as well in this post.
Long story short, everything I have seen in my spread sheet calculation analysis shows me that provided you can build a clean high efficiency transmission to give you multiple gear ratios (mutli-sprocket spools on opposite ends of a single roller chain loop with derailers to move the chain up and down the spools with a chain tensioner n the non-load leg of the loop systems are among the most efficient possible often with mechanical efficiency in the 95-98% range) where you loose less in the transmission gears then you would if you allowed the motor to be dragged down below its efficient RPM range having multiple gear ratios in the system is an excellent thing that improves performance and extends range under real world conditions. For light vehicles, especially if you can use roller chain on multi sprocket spools to achieve the multiple gearing ratios that isn't hard to accomplish, especially when you consider that with the efficiency curve on many of the motors we use you don't have to drag the RPMs down very far at all before you end up in the sub 50% efficiency range on the motor. As I said the scooter motor I've got a full specs sheet for that was intended and designed for a peak efficiency and power output in the 400-500 RPM range only has to get dragged down to 300 RPM or less before its efficiency is in the sub 50% range. I think a whole lot of people don't realize how quickly the efficiency on electric motors goes to ^#%#%^#@ when you start dragging them to much less then their designed power band under load which is exactly what happens when you start climbing hills and bucking headwinds with a single gearing ratio electric vehicle.

")