Hey guys,
I installed my Cycle Analyst V3 on my motorcycle yesterday and had a couple questions-
How did you install the speedometer? The magnet that attaches to the wheel is made for a spoke, not a rim... Any ideas?
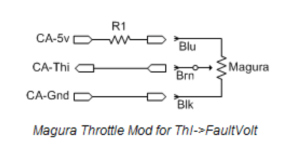
I am using a Magura throttle with a Kelly controller, am I able to pass the throttle through the CA? If so, what is the benefit?
Thanks for the help guys.
Here's a picture of the bike, because who doesn't like pictures of motorcycles?

I installed my Cycle Analyst V3 on my motorcycle yesterday and had a couple questions-
How did you install the speedometer? The magnet that attaches to the wheel is made for a spoke, not a rim... Any ideas?
I am using a Magura throttle with a Kelly controller, am I able to pass the throttle through the CA? If so, what is the benefit?
Thanks for the help guys.
Here's a picture of the bike, because who doesn't like pictures of motorcycles?