christianalexzappa
1 mW
Noob here, trying to troubleshoot some odd behavior with my bike which has progressively worsened.
The Bike (Fonz NKD, made in Australia by a small scoter/naked bike brand) runs a EM150SP & QS Mid Drive Motor 3000w paired to a 72v 85ah Battery.
They are looking into it, but they are based in Sydney and I'm not so their only able to go off evidence provided by me and their service partner.
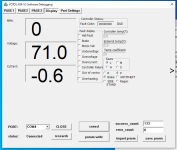
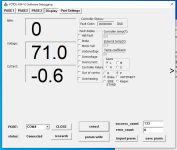
In modes 2 & 3 (mid and high), a 86kmph-89kmph and then again in the mid to high 90s I get some momentary power loss, sometimes aggressive dipping amps on the DKD display low and other times just little blips (like the brakes haves been tapped, BTW not the brakes).
Weirdly, full throttle seems to be fine, and it's doesn't seem to be "load" dependent, I've had a local mechanic take it for a ride (a much trimmer guy than me). It can also happen going downhill (but doesn't discriminate on incline).
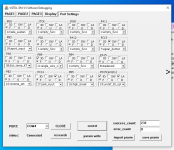
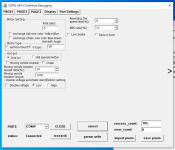
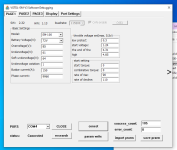
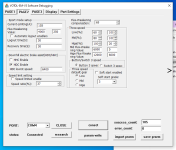
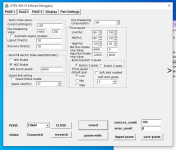
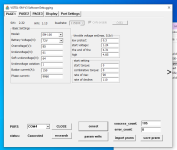
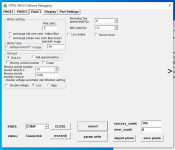
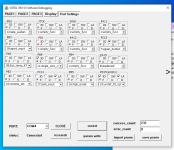
I purchased a debugging usb cable, attached are some screenshots, no fault codes presents. But wondering if there is anything glaringly obvious.
The Bike (Fonz NKD, made in Australia by a small scoter/naked bike brand) runs a EM150SP & QS Mid Drive Motor 3000w paired to a 72v 85ah Battery.
They are looking into it, but they are based in Sydney and I'm not so their only able to go off evidence provided by me and their service partner.
In modes 2 & 3 (mid and high), a 86kmph-89kmph and then again in the mid to high 90s I get some momentary power loss, sometimes aggressive dipping amps on the DKD display low and other times just little blips (like the brakes haves been tapped, BTW not the brakes).
Weirdly, full throttle seems to be fine, and it's doesn't seem to be "load" dependent, I've had a local mechanic take it for a ride (a much trimmer guy than me). It can also happen going downhill (but doesn't discriminate on incline).
I purchased a debugging usb cable, attached are some screenshots, no fault codes presents. But wondering if there is anything glaringly obvious.