View attachment 343588Nucular Field Weakening
Maybe you already found this information but it shows Nucular takes steps to ensure you don’t overvoltage your controller. It will only allow the motor to reach a speed where the back EMF cannot destroy the controller in the event you somehow end field weakening while over rated rpm.
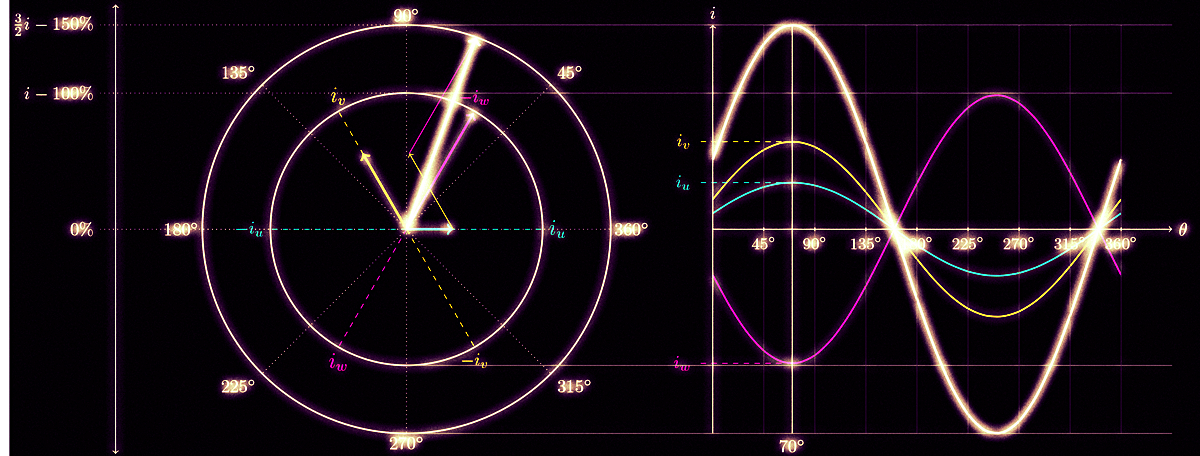
I think there are various ways to implement FOC, the basic concept is, if you accelerate and peak phase amps and before reaching any rpm limit you set, if phase amps begins to decrease the controller knows its BACK EMF has decreased the voltage difference and phase current slowly decreases.
in the settings you can specify the maximum amps that can go towards weakening the d-axis flux, and they give the example of if phase amp limit is 100a and FW amp limit is 30a, then basically as you accelerate all 100a of phase current goes to torque until back emp starts decreasing the phase amps. Perhaps when phase amps drop to 97a, field weakening amps will begin to increase.
As you go faster you might have 80a making torque and 20a weakening the field, reducing back EMF, but also reducing torque. Then at max speed, 70a is going towards torque and 30a for field weakening.
The important thing is it’s still 100a adding heat to the motor. So these settings should be adjusted to the motor temperature. You definitely don’t want 500 phase amps going continuously to a motor that cant handle it for more than 30s.
This controller makes it easy to limit FW depth. 0a FW if you want it off, increase the amps slowly until the steady state current drops within maximum continuous current (based on how hot you want to allow your motor to get).
Be aware that there may be other settings that help the controller know what to do. Most notably the motor parameters section. By giving it the correct data, the controller does need to entirely wait for feedback to get it in the ballpark. It knows what correction factors to add to the algorithm trying to inject field weakening current at the same time it’s controlling the torque current.
The other thing about field weakening is its very expensive in terms of efficiency. In the case where 30% was wasted to weaken the field, and that means the 70a can only make as much torque as 50a, you might see it takes 100% more current to go 20% faster if you are already going fast. Field weakening works best where the rated rpm steady current draw is below rated current of the motor.
Good luck with your controller. It seems nice. Wish I could afford one. Lol.