fatty said:
BalorNG said:
I actually did. Multiple times. *sigh*
Post your numbers here for accurate advice.
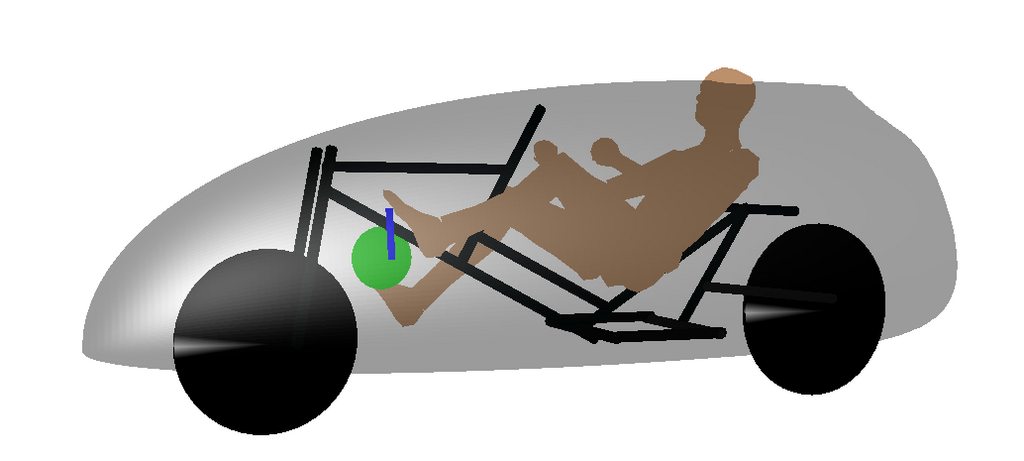
Is that a mockup?
There's a lot of lower-hanging fruit.
GMAC hub motor with locked clutch: no drag and does regen.
Well, if you want numbers…
120 kg – my weight (there is some decent leg muscle in there, but I can stand to lose 40 kg to be sure, yet it’s not likely to happen overnight)
I did a full randonee series (200, 300, 400 and 600) on a typical upright bike, but I was a bit younger and a lot fitter/healthier than.
Planned vehicle weight – 50 kg at the very least, unfortunately – I have 15 kg of lifepo battery so this can work at all, and there is the aerodynamic shell – which is planned to be pretty light (non structural), but still... While adding a small gas motor would likely be a more of a ‘low-hanging fruit’ indeed ultimately I want to see whether a true hybrid HPV system is possible where you use external power just to level hills AND recuperate it by regen, ‘regen pedaling’ on flats and using the bike as a trainer (which is what I’m currently doing and actually having problem to get RID of resulting charge resulting from multi-hour training sessions).
Not exactly practical, but if I wanted something ‘practical’ I’d just get a car. I do it for the challenge – it is that ‘unassisted’ hills is a bit *too much* of a challenge for me so far, and getting even MORE battery is frankly getting ridiculous (not to mention expensive!). I’m having enough of a headache in getting it to fit.
Yes, this a mockup, a rideable mockup – the joints are pretty tough, if flexy and heavy. The concept is being refined, once I’ll finalize it I’ll bond the joints with carbon fiber (no welding for me).
The shell is delayed due to COVID and other related problems, but I *should* have it by summer.
CdA of the shell as pictured (the top will be lopped off for vision) is 0.046, but I’ll be happy to have double that in practice. Still, that’s nearly an order of magnitude less than a typical touring bike/MTB ebike, and quite a bit more aero than TT bikes despite being a side of a ‘small bus’ (3 meters long). It is decently fast even with no shell, surprisingly enough (hit 50 kmh in sprint)
Here is me on early iteration prototype:
https://youtu.be/yWvE6yLxuJo
GMAC hub motor with locked clutch: no drag and does regen.
*sigh* A motor with a ‘locked clutch’ and no drag is possible (SynRM?) but we are not quite there yet, and any permanent magnet motor will have drag, and the more powerful the motor – the more drag, it is inevitable due to physics (iron losses).
I expect about 30w of no-load drag at cruising (40kmh) speed, on par with GMAC, and given running time of about 15 hours to reach my destination goals, that would be about 450 wh wasted just to ‘get even’.
I expect to regen about 1000 wh during this time (based on my numbers, assuming efficiency of 85% and data from Computational cyclist), so if push comes to shove I’ll just eat those losses, it’s worth it – given aerodynamics that is much better than ‘average’, of course.
A much smaller motor with no-load drag of 10w at cruising speed is something I’m willing to swallow, but it will not be nearly enough even to scrub speed for any noticeable (above 5%) hill. Oh gravity, though art a heartless bitch.
However, if friction drive is THAT inefficient I think I’m better off with ‘fixed gear’ (I’m using RC middrives allaround, much better value given that I have a 3d printer handy and laser cutting and bolding/bonding stuff is relatively cheap and easy).
Maybe I should do them myself once roads are cleared of ice? I presume using a shaped (and larger diameter) roller *will* make it more efficient, but I’ll have to fab it and make sure it is strong enough to withstand the loads…
If anyone has alternative ideas how a ‘clutch system’ that can withstand to about 5 nm of torque peak (‘first stage’) can be easily fabricated (3d printed, say) and operated reliably so motor can be engaged and disengaged from the wheel, I’d very like to hear them.
P.S
Did some research.
It seems that a friction drive generates a whooping 100w of drag when under full engagement… while formidable, this is still much better (due to intermittent use) than having the motor drag all the time – and since the system is self-adjusting, it should cost me about 10% of braking efficiency at worst, which is still much better than nothing, or permanent motor drag.
Also, there is more to this than meets the eye. Provided you don’t go overboard with the torque (I will not – my goal is *efficient* operation, and braking is easier than acceleration anyway – other drag forces are ‘working for you’ so to speak now), and there is no ‘roller’ slippage, the extra drag is basically additional tire rolling resistance, hence all factors that reduce it will reduce will help as well, and my tire should pretty damn good - Marathon Almotion installed tubeless.
Btw, ‘can’ of the Flipsky 6384 190kv motor I have is slightly textured, that should help too I think…



") Intermittent would be braking a few seconds here, a few there, with minutes or more in between.
Intermittent would be braking a few seconds here, a few there, with minutes or more in between.