2WheelsMovesTheSoul
100 W
- Joined
- Oct 17, 2017
- Messages
- 197
As a KLS-7230S owner, user and abuser, Imma chime in here.
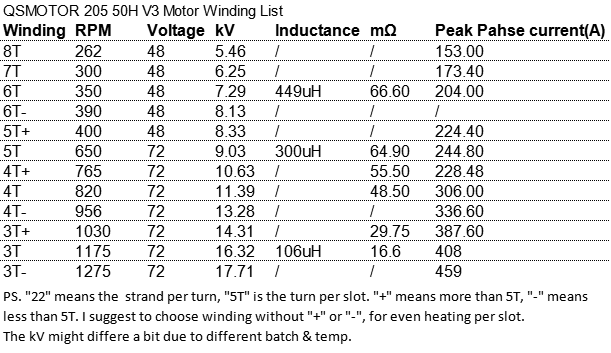
I run mine on QS205 50H V3 3t motor with Statorade and Hubsink fins. I also have a 300a shunt metering power consumption. My pack is 72v nominal and 200a capable.
I routinely pull the controllers limit of 120a which pushes my tubby ass and 150lb bike up to a swift AF 55 mph and have had no overheating issue with the KLS as of yet. It is externally mounted (using Qulbix shield)and gets plenty of air though. As far as it being a small controller, internally, nearly all available space is utilized. Say a KT controller, one of those candy bar shaped ones, there is a huge waste of space inside and there's very little mass for heat to get out. That's why it's so long. The KLS is far heavier in a smaller overall footprint.
However, I do share the same gripe. From 0-10, it is an absolute fuggin slouch. It feels like any basic bitch 500w controller, once you reach say 8-10mph, with the right settings it ramps up like a mofo and begins to perform like a motorcycle. Generally speaking when I ride my bike, I'm only at 0mph when I leave my house and occasionally at traffic lights. When already rolling... even down to 5 mph. The slow start BS virtually disappears.
If you want a smooth, silent and very efficient controller, the KLS is a relatively good choice. I only say good because by now Kelly really should have some sort of LCD, OLED or TFT display. While it may have a Bluetooth app, its by no means a real time HUD. That would be my 2nd biggest gripe.
I run mine on QS205 50H V3 3t motor with Statorade and Hubsink fins. I also have a 300a shunt metering power consumption. My pack is 72v nominal and 200a capable.
I routinely pull the controllers limit of 120a which pushes my tubby ass and 150lb bike up to a swift AF 55 mph and have had no overheating issue with the KLS as of yet. It is externally mounted (using Qulbix shield)and gets plenty of air though. As far as it being a small controller, internally, nearly all available space is utilized. Say a KT controller, one of those candy bar shaped ones, there is a huge waste of space inside and there's very little mass for heat to get out. That's why it's so long. The KLS is far heavier in a smaller overall footprint.
However, I do share the same gripe. From 0-10, it is an absolute fuggin slouch. It feels like any basic bitch 500w controller, once you reach say 8-10mph, with the right settings it ramps up like a mofo and begins to perform like a motorcycle. Generally speaking when I ride my bike, I'm only at 0mph when I leave my house and occasionally at traffic lights. When already rolling... even down to 5 mph. The slow start BS virtually disappears.
If you want a smooth, silent and very efficient controller, the KLS is a relatively good choice. I only say good because by now Kelly really should have some sort of LCD, OLED or TFT display. While it may have a Bluetooth app, its by no means a real time HUD. That would be my 2nd biggest gripe.
")