
kubark42
1 W
- Joined
- May 15, 2020
- Messages
- 61
everythingisawave said:Silly question perhaps, what's a redrive?
Some kind of speed reduction unit.
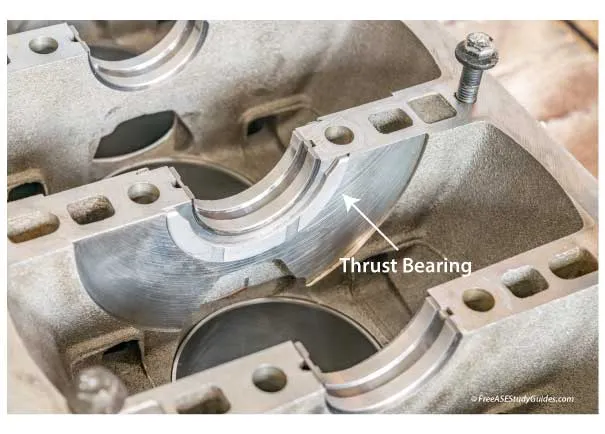
flippy said:please dont forget that motor bearings are designed for axial loads. aka: rotating, not pulling/pushing.
a prop directly attached without thrust bearings will basically pull the rotor out from the stator and kill the bearings en if they do stay together. not something you want to happen in the air, or like...at all.
I had this same conception, and was surprised to find out that that's not what happens. It turns out that the forward thrust is a very small component of the overall loads, and standard roller-bearings can resist both axial and radial forces. I have several dozen airplane motors, from 5W for drones to >40kW for manned flight and every one of them uses standard roller bearings. Likewise for my 25hp 2-stroke plane engine where I just replaced the bearings.
P.S. Does anyone else have problems with E/S email notifications? I just got an alert there was a new message and I see I missed several days of the thread.
") for some things (I'm good at pattern analysis, deductions, stuff like that, and have a lot of general knowledge tucked away in here somewhere, when I can find it), I am not sure I am qualified to advise which actual systems will do what you want. :/
for some things (I'm good at pattern analysis, deductions, stuff like that, and have a lot of general knowledge tucked away in here somewhere, when I can find it), I am not sure I am qualified to advise which actual systems will do what you want. :/