moriamoria
1 mW
Hello every one,
After briking a kt 48ZWSKT-SJT02L where I have flash with stancecoke/BMSBattery_S_controllers_firmware (even after install a current sensor), I decide to floow "stancecoke" advise on a precedent post and to go to a lushui controller.
I have found a LSW 667-31F 36v controller (I just have to change one FET that is HS). the motherboard is LSW6G_90B-FOC-171215
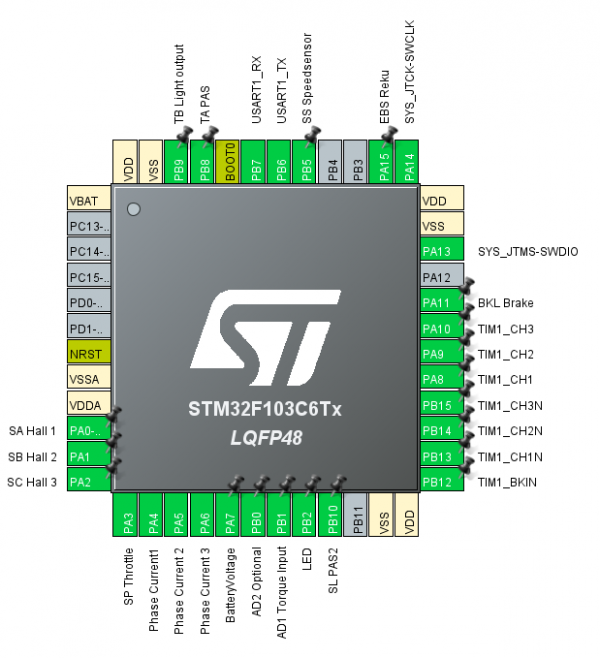
on this motherboard, I think the specification for open source looks ok :
STM32FEB KC6T6
1* LM317 regulator
3* FD03S
C34 H91C
....
After the story, my questions :
After briking a kt 48ZWSKT-SJT02L where I have flash with stancecoke/BMSBattery_S_controllers_firmware (even after install a current sensor), I decide to floow "stancecoke" advise on a precedent post and to go to a lushui controller.
I have found a LSW 667-31F 36v controller (I just have to change one FET that is HS). the motherboard is LSW6G_90B-FOC-171215
on this motherboard, I think the specification for open source looks ok :
STM32FEB KC6T6
1* LM317 regulator
3* FD03S
C34 H91C
....
After the story, my questions :
- Can any one send me the stock firmware and the tools to set properties on the current firmware.
- Is it a good controller for EBiCS_Firmware
- Can I use a KT lcd3 display on it.
- Could you confirm that I need to add a DC to DC converter for a bluetooth adapter?
- I have a 48v battery, and the resistance for the board power supply is 100 homs, Do I need to adjust it ?
- Finaly I will use a magnetic pedal sensor. Ok for that ? I think stanceoke sais it was ok.
Attachments

Last edited:

")