cboy
100 W
I have a three wheeler shown in this build thread with dual QS Motors hub wheels at the rear. Dual Kelly KLS7230S controllers. Resistance throttle to Cycle Analyst 3 and a single throttle control wire from the CA3 to each controller. From a dead stop the trike pulls hard to the left (driver’s side) under moderate to heavy acceleration.
* If the trike is rolling (5-10 mph or more) the trike goes straight under heavy acceleration.
* If accelerate slowly from dead stop, the trike goes straight.
* When accelerating heavily and pulling left, a quick release and then apply full throttle - trike goes straight.
* When trike is cruising, it tracks and runs straight...no dog tracking, and no wandering in either direction.
What I’ve checked so far:
* Throttle signal from the CA3 is identical at both controller connection pins. (.884 volts at rest, 3.665 volts at WOT)
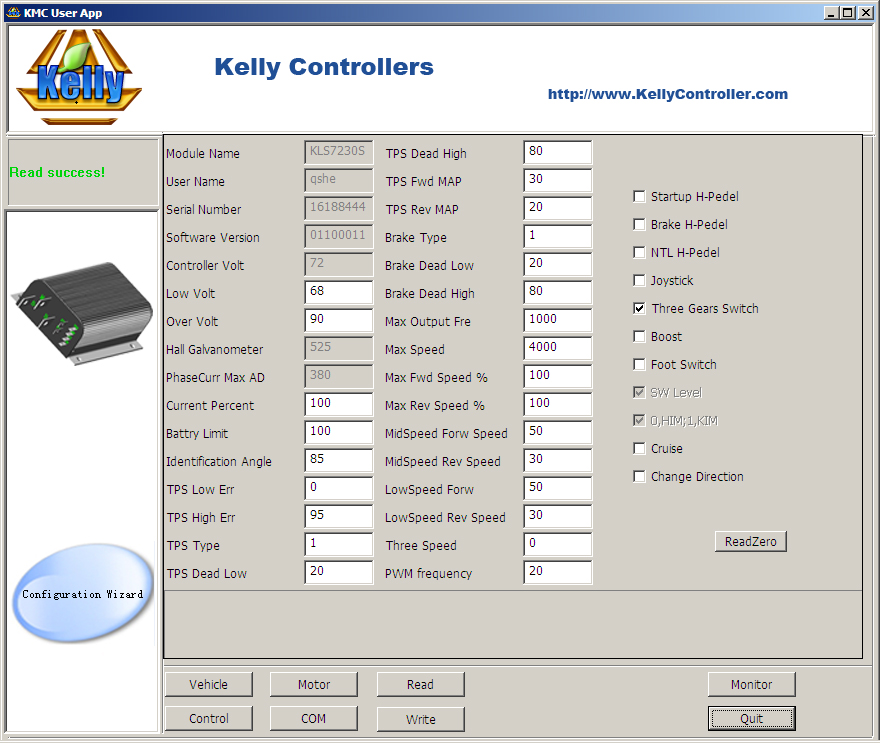
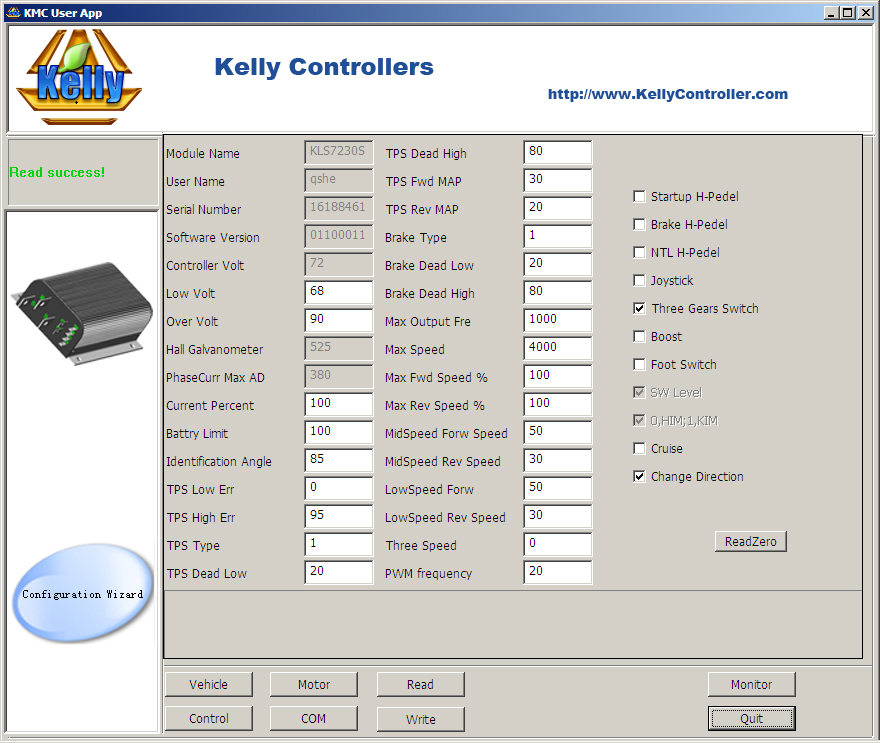
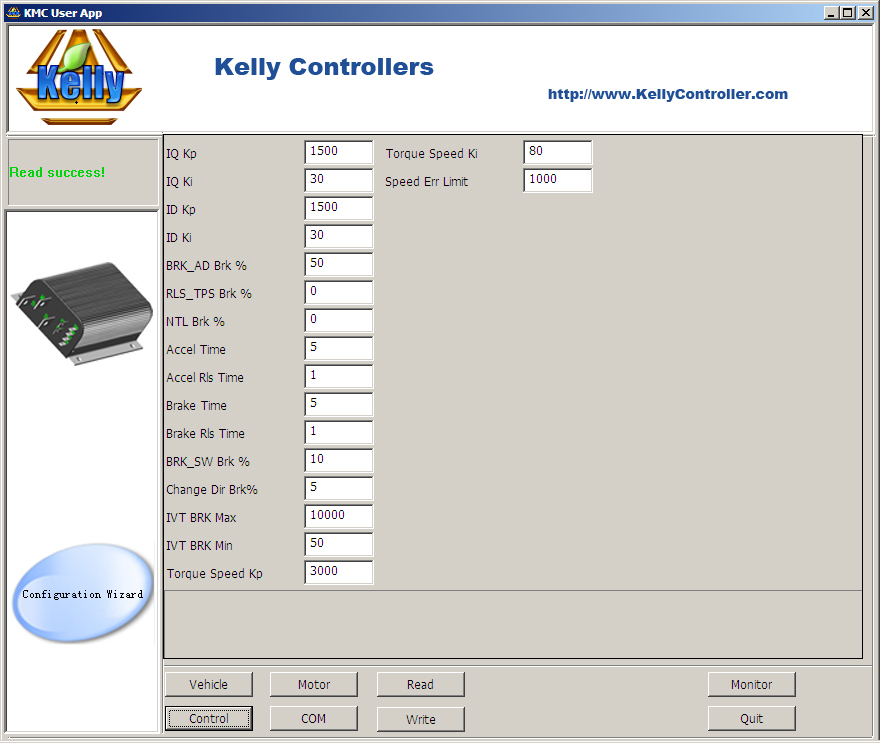
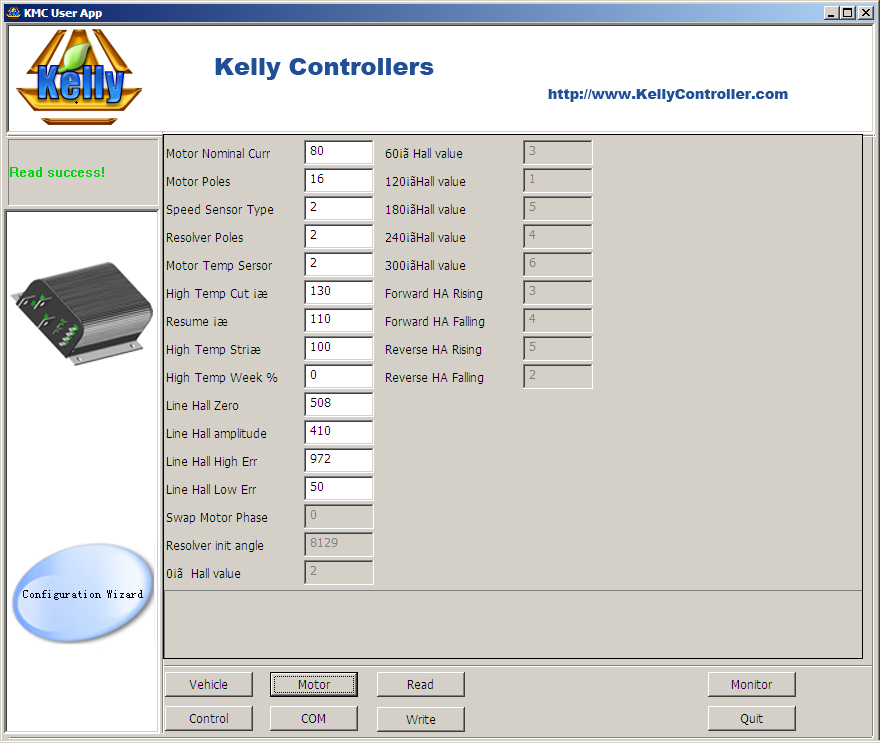
* The programming in both controllers is absolutely identical except Controller P has the box checked to “change direction” of this wheel. Controller D does not have this box checked. The “change direction” function allows both wheels to run in sync in the same direction. To insure this wasn’t the problem, I reversed the settings in the two controllers and the trike still pulled left.
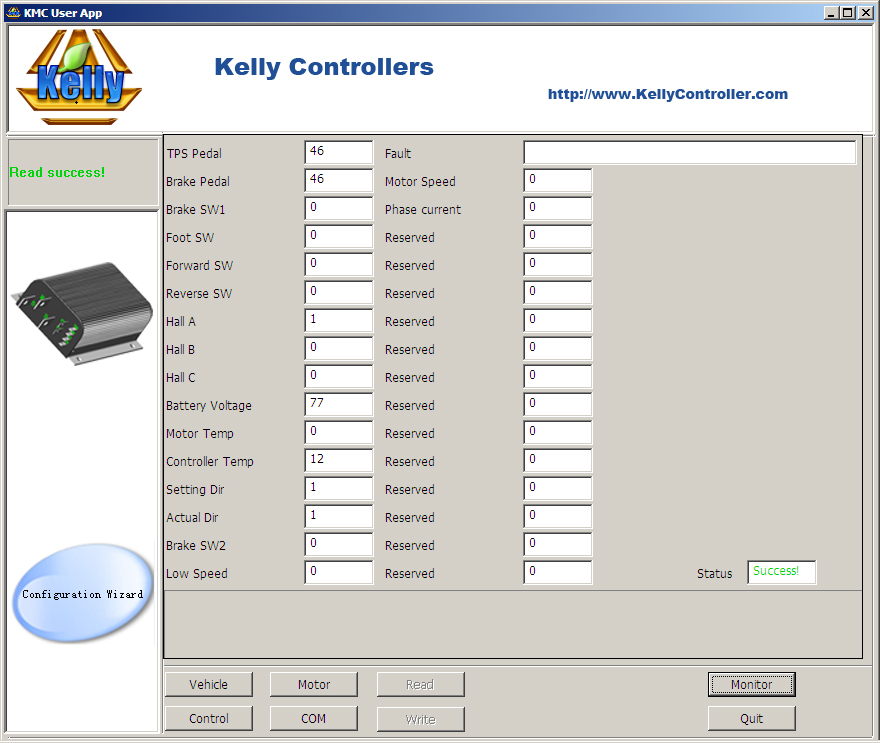
* The Kelly software monitor indicate that during operation both controllers are receiving a throttle signal of 46 (on a scale of 0-255) while at rest. At WOT both controllers are receiving a throttle signal of 185 when the wheels are not in gear.
* The monitor can also be used to compare throttle input to motor speed with the wheels in gear and up on blocks so they can spin freely. I ran a series of three tests at each of three different throttle inputs on each controller. The average results were nearly identical for both controllers.
Controller D
Throttle at 80 Ave. Motor speed is 208
Throttle at 100 Ave. Motor speed is 357
Throttle at 146 Ave. Motor speed is 1096
Controller P
Throttle at 80 Ave. Motor speed is 211
Throttle at 100 Ave. Motor speed is 357
Throttle at 146 Ave. Motor speed is 1098
* During the above throttle/motor speed tests, both wheels visually appear to increase speed directly in response to throttle input without lulls or glitches.
* Since the pulling left issue is only during moderate to heavy acceleration the "throttle/motor speed" tests may be of limited value since they don't show what's happening at acceleration.
So at this point I’m looking for other potential explanations, troubleshooting hints and/or test procedures to determine what is going on. This may also be chassis related rather than electronics but I would think a chassis problem would have a number of additional symptoms which I’m not seeing thus far. The chassis design is shown in the build thread link above and is pretty straightforward. But theories are always welcome to explain how the chassis might be the culprit.
* If the trike is rolling (5-10 mph or more) the trike goes straight under heavy acceleration.
* If accelerate slowly from dead stop, the trike goes straight.
* When accelerating heavily and pulling left, a quick release and then apply full throttle - trike goes straight.
* When trike is cruising, it tracks and runs straight...no dog tracking, and no wandering in either direction.
What I’ve checked so far:
* Throttle signal from the CA3 is identical at both controller connection pins. (.884 volts at rest, 3.665 volts at WOT)
* The programming in both controllers is absolutely identical except Controller P has the box checked to “change direction” of this wheel. Controller D does not have this box checked. The “change direction” function allows both wheels to run in sync in the same direction. To insure this wasn’t the problem, I reversed the settings in the two controllers and the trike still pulled left.
* The Kelly software monitor indicate that during operation both controllers are receiving a throttle signal of 46 (on a scale of 0-255) while at rest. At WOT both controllers are receiving a throttle signal of 185 when the wheels are not in gear.
* The monitor can also be used to compare throttle input to motor speed with the wheels in gear and up on blocks so they can spin freely. I ran a series of three tests at each of three different throttle inputs on each controller. The average results were nearly identical for both controllers.
Controller D
Throttle at 80 Ave. Motor speed is 208
Throttle at 100 Ave. Motor speed is 357
Throttle at 146 Ave. Motor speed is 1096
Controller P
Throttle at 80 Ave. Motor speed is 211
Throttle at 100 Ave. Motor speed is 357
Throttle at 146 Ave. Motor speed is 1098
* During the above throttle/motor speed tests, both wheels visually appear to increase speed directly in response to throttle input without lulls or glitches.
* Since the pulling left issue is only during moderate to heavy acceleration the "throttle/motor speed" tests may be of limited value since they don't show what's happening at acceleration.
So at this point I’m looking for other potential explanations, troubleshooting hints and/or test procedures to determine what is going on. This may also be chassis related rather than electronics but I would think a chassis problem would have a number of additional symptoms which I’m not seeing thus far. The chassis design is shown in the build thread link above and is pretty straightforward. But theories are always welcome to explain how the chassis might be the culprit.