PROGRAMMING / USER FRIENDLINESS
Some experimental results, and some thoughts:
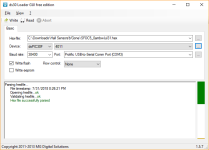
My switch-in-the-tx line doesn't do what I expected. It does make the SFOC go into or out of programmer-connected mode (1 on the status LEDs), when switched to the resistor to hold the TX line high and disconnected from teh USB, it's out of that mode, but it shows status of 9, and when switched back to TX-connected, it doesn't respond to realterm correctly until I:
--disconnect the cable at the SFOC serial port
--power the trike off
--reconnect the cable at the SFOC serial port
--power the trike back on.
At that point realterm will receive and display the last stats, and the SFOC will accept new programming data.
Sometimes, without doing that sequence, just switching the TX line from high to connected, SFOC will receive and echo some characters of the strings sent, but it doesn't do the whole string, and it doesn't send the logged stats, and it blinks error 3 after sending anything.
So for now I will either:
--extend the serial end of the cable, with a connector in it I can completely unplug without getting under the trike,
or more likely:
--use a ganged switch that switches more than one line, once I figure out which ones have to disconnect to totally take it out of any mode that makes it think it's connected. It might be all of them, except perhaps it's TX-out and it's CTS-out. Since the switch I had on hand is a 3PDT (center-off), I can switch the 5v and the RTS lines, too, see what that does. Otherwise I may have a 5PDT switch somewhere. If not, I have 4PDT I can simply add to the switch I already have; won't be totally ganged together, but should still work to switch all the wires connected/disconnected as if I were plugging/unplugging the whole cable without actually doing that.
Otherwise it's quite a task to experiment with settings. :/ (mostly because getting down to the ground and back up off of it for me is difficult, and reachign under the trike to fiddle with the connector to get it connected or disconnected takes a bit of time since I can only do it one-handed unless I lay on the ground; poor planning on my part for where the controller is placed). Each change takes 5-10 minutes to accomplish (out in the heat, which even after dark is still 95-100F+ and 25-40%+ humidity ATM--if it were a "dry heat" it wouldn't be so bad. :lol: ).
Some experimental results, and some thoughts:
My switch-in-the-tx line doesn't do what I expected. It does make the SFOC go into or out of programmer-connected mode (1 on the status LEDs), when switched to the resistor to hold the TX line high and disconnected from teh USB, it's out of that mode, but it shows status of 9, and when switched back to TX-connected, it doesn't respond to realterm correctly until I:
--disconnect the cable at the SFOC serial port
--power the trike off
--reconnect the cable at the SFOC serial port
--power the trike back on.
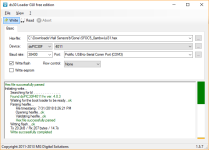
At that point realterm will receive and display the last stats, and the SFOC will accept new programming data.
Sometimes, without doing that sequence, just switching the TX line from high to connected, SFOC will receive and echo some characters of the strings sent, but it doesn't do the whole string, and it doesn't send the logged stats, and it blinks error 3 after sending anything.
So for now I will either:
--extend the serial end of the cable, with a connector in it I can completely unplug without getting under the trike,
or more likely:
--use a ganged switch that switches more than one line, once I figure out which ones have to disconnect to totally take it out of any mode that makes it think it's connected. It might be all of them, except perhaps it's TX-out and it's CTS-out. Since the switch I had on hand is a 3PDT (center-off), I can switch the 5v and the RTS lines, too, see what that does. Otherwise I may have a 5PDT switch somewhere. If not, I have 4PDT I can simply add to the switch I already have; won't be totally ganged together, but should still work to switch all the wires connected/disconnected as if I were plugging/unplugging the whole cable without actually doing that.
Otherwise it's quite a task to experiment with settings. :/ (mostly because getting down to the ground and back up off of it for me is difficult, and reachign under the trike to fiddle with the connector to get it connected or disconnected takes a bit of time since I can only do it one-handed unless I lay on the ground; poor planning on my part for where the controller is placed). Each change takes 5-10 minutes to accomplish (out in the heat, which even after dark is still 95-100F+ and 25-40%+ humidity ATM--if it were a "dry heat" it wouldn't be so bad. :lol: ).
")