Some bad and wierd news; the phase wired melted, but not while in use, just while sitting there overnight powered on.
Last night, after I got back from the grocery/test run, the motor and wire temperatures both cooled down to ambient (low 70s F) while I unloaded the groceries and made dinner. Probably about an hour or so. The system was still powered on but not doing anything, just sitting by the back porch. I also examined the jacket and the phase wires that ocme out of it (or at least, the heatshrink over each wire I'd installed between the jacket and the splices to the 8g stuff). There was no damage or sign of heating.
At the time I checked the temperatures, I hand-rolled (walked) the trike over to the shed and inside it, so I could charge it up. The trike rolled easily like normal. No throttle or motor usage to move it.
Plugged in the charger cords for lights and traction batteries, verified charging in progress, and no LEDs lit on the SFOC Status LED panel. Note that I did not switch the SFOC off at the LED Status panel switch, and it was left powered with the rest of the trike during charging.
Pushed the trike a bit further in the door to get past it to leave the shed and go back to the house, still rolled easily.
Went out this morning to go to work, unplugged the chargers, and tried to roll the trike backwards out of the shed, but it was VERY difficult. I jacked up the trike's right side, and almost could not hand spin the wheel--it was pretty much just like the other day when the phase wires melted together during the test ride. I turned off the main power, and there was no difference. Disconnected the phase wires from the SFOC, no difference.
I did not look at the LED status panel before powering the system off, so I don't know if there was an error code or not.

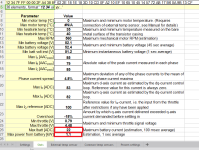
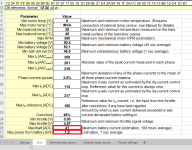
I also did not check the temperature readings; I wish I had, cuz it would've potentially confirmed or denied my theory further down this post.
Examined the phase wires near the axle, where they are only 18g, and could see the jacket is melted along the line of at least one of the wires. I cut the wires as close to the dropout/axle as I could, without removing the motor, and the motor then spun freely.
At that point, I had to get to work immediately, so I left the SFOC phases disconnected, and siwtched it off ath the status LED panel, powered the trike on, and went to work using just the leftside motor system.
ONce I got home from work, I had a chance to do an isolation test (passed 5.5gigohm axle to phases) examine the phase wires I'd cut off, and open the motor and check it out inside, and get some pics, which are over here to keep this thread less clogged up.
https://endless-sphere.com/forums/viewtopic.php?f=2&t=67833&p=1450462#p1450462
During the disassembly, I was very slow and careful, so I could see if there mgith be an origin point, but there doesn't appear to be.
Along the axle itself, the jacket and teh wires are undamaged, so the axle (and the metal tube/sleeve/dropout-spacer around it and the wires there) must've wicked away the heat enough to prevent a problem.
The blue phase wire is the least damaged of them all (and it was the only one that had any short to the stator before I fixed that, so that is highly unlikely to be a cause), and has no direct damage once it is inside the motor past the axle.
The yellow and green wires look in one place as if their insulation melted together and allowed them to short. This is outside the motor, in the seciton of wire I cut off before heading to work. Other places on those wires inside the motor look pretty bad, but they definitely weren't shorting, or the motor would not have turned easily. If they were *almost* shorting then I would've expected arcing across them while riding from the BEMF generated inside the motor, which would've applied braking on that side, but that did not happen anywhere during my ~5 mile commute. (~2.5miles each way).
There's no point at which insulation failed enough to short to the stator, either.
So...the wierd part...the damage was not caused by operating the motor. The damage had to be caused by the trike just sitting there, powered on, not moving, overnight, in a cold shed.
The thought crosses my mind that the SFOC5's "sleep mode" "holds" teh wheel in position somewhat, and this must use some current flow between phases (even if it is small, and doesn't use much battery current). This current shouldn't be enough to heat the wires, however, unless it's a lot more than I would've expected. Alternately, if it didnt' go to sleep for whatever reason, perhaps it is the small (tiny?) position sensing currents.
But if it *is* enough to heat 18g wire over several hours (with no windflow past them to cool them off), it would explain the wire damage.
Since it was sitting out in the nice cool breeze for the hour after I got home but before I put it in the shed, the airflow would've continued to dissipate the heat. But in the closed shed there'd be no breeze, so even though the ambient temperature would still drop, there'd be no sgnificant airflow past teh wires so in their insulating jacket they'd continue to warm up.
It couldn't be caused by a short inside the motor itself...as it wasnt' shorted inside the motor, just outside the axle.
However, there was still melted insulation inside the motor (which could, of course, have been caused during any of the testing the last couple days, and I wouldn't know, not having opened it until now), as well as outside the motor (which was not visibly damaged prior to parking it for the night to charge).
These appear to point to heating during the night, and I can't imagine anything in the system that could cause it, unless the SFOC's sleep mode (or position sensing) does keep putting a current thru it.
Even if the short itself already existed somehow, the wires external to the axle were not damaged in the way I found them in the morning. *something* had to pass enough current thru them overnight to cause the heating that damaged them...and I'll need to figure out what that is so it doesn't do it the next time I leave the SFOC powered on but the trike not in use (like during charging); it's almost certainly going to happen at some point, unless I build a relay system that shuts the SFOC off whenever the charger is plugged in--which should be totally overkill and unnecessary.
It'll require dedicated testing to see if this could be the cause; if there is any significant current or heating, but first I have to replace the phase wires in the motor again, and instrument it for thermal sensing on the wires themselves in multiple places if I can. :/