speedyebikenoob said:
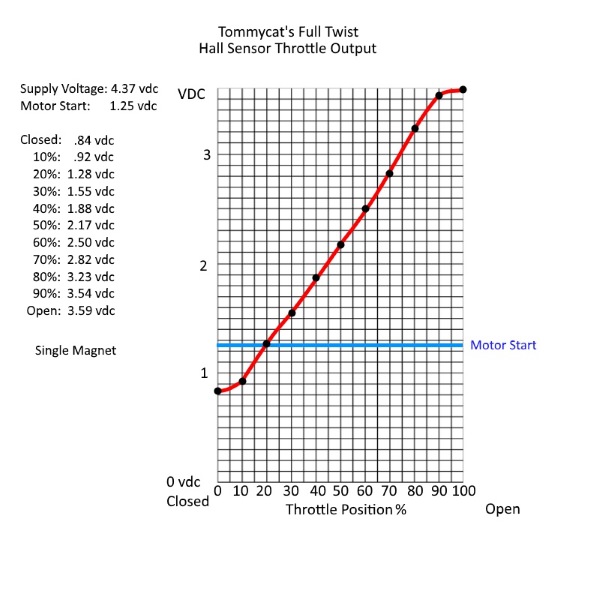
Why is there a huge deadzone anyways?
Cuz many (most) ebike-parts manufacturers are cheap, making cheap stuff that is (often poor) copies of other cheap stuff.
Developing a throttle with no deadzone would take some time and thought to design and build, whcih means money, and a market would be required to pay for that.
Since crappy throttles have sold just fine for a really long time, there's "obviously" no need to spend any money to improve them, since "no one" is going to spend more money on the improved versions than they would on the cheap existing ones, and thus no one would be paying for the changeover. So it's not worht doing, to the marketers and accountants.
The same applies to just about any product--if' it's already "good enough" for the market, then it's not going to get changed, until a better product is made by someone that takes enough market share to force others to change theirs too.
Cottage industries do exist for certain improved versions of things like this, or stuff that helps make them work better (like ZombieSS's Throttle Tamer that helped high power bikes be more controllable with cheap crappy throttles...but nowadays high power controllers themselves more and more often let you fix this in their own software, eliminating the need for the TT).
A really good throttle would be:
--metal (durability, size can be smaller for better strength, can fit closer to other handlebar equipment, etc)
--dual sensor with inverse outputs (safety feature--either one doesn't match the other's output, then controller doesn't do anything--but requires the controller support this, and few do as of yet) (also allows to be used as left or righthand throttle, or to roll on/off throttle in whichever direction is desired)
--adjustable "throw" (to fit the ergonomics of different riders and different mounting options); set screws (or something) could be used to limit rotation, and magnets (if a hall type) could have adjustable positions inside it to allow deadband/etc response. *or* a bit of electronics could be built into the throttle with a serial programming connector to connect to a PC/etc, that lets you adjust the scale of the rotation to the scale the controller requires to match each controller to each throttle.
--roll-on switch to that engages only once throttle is manually turned (can be safety feature or used as brake switch, etc), dual output both NC and NO
--either comes in thumb, full grip and half grip versions, or has interchangeable "grip" on it, positionable in whatever rotation (vs the base) the rider needs for ergonomics. (allows more uses than a fixed-grip single type grip would)
--has a model with "detent" in center of throttle range to use half rotation in one direction for braking and half in the other for throttle, like the Vectrix scooters did. (would be difficult to have an option to put this into every unit; easier to have a separate version).
But it'd probably cost $100-200 each for such a throttle, as demand would be very low.
All that said, more and more controllers have programmable options that let the rider adjust throttle response to match their actual throttle and/or needs. So there's less and less reason to require no-deadband throttles.