markz
100 TW
I have been looking for the vids and info of Justin and other "Guru's" talking about a wide range of, everything motors.
Basically a few things bug me. The main.... Many people whine about trying to stay legal so they dont get thrown in the Gulag by "The Man".
Another is trying to wrap my brain around the aspect of KV, winding and torque.
I did it to help me out, but hopefully help others out too. Just spent a couple hours or more combing over it.
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=14482&p=218275&hilit=myth#p218275
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=24593&p=381600&hilit=myth#p381600
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=7891&p=980986&hilit=myth#p980986
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=64907&p=984783&hilit=myth#p984783
Justin in a youtube video, by Electric Bike Review Youtube blogger/reviewer.
https://www.youtube.com/watch?v=IxB2j-egWcQ
@ 6:00 and @ 7:50
@11:30 legal and @12:00 power @12:15 cont. amp and rpm.
@18:00 Battery cycles, SOC (Dont charge fully, but to 80% or 90% battery length increases)
@21:00 BMS phantom draw
@27:00 Bosch charger 3 pin, just need 5V to hack and 5.3A charge max.
@29:00 Ah consumed, rather then remaining.
@30:00 skateboards
@43:10 - The old store location, CA,
Video on water ingress
https://www.youtube.com/watch?v=gwlbAJLzI_w
This is more for me, but hopefully will help others out.
I will reserve a few spots for other "Guru" quotes.
Basically a few things bug me. The main.... Many people whine about trying to stay legal so they dont get thrown in the Gulag by "The Man".
Another is trying to wrap my brain around the aspect of KV, winding and torque.
I did it to help me out, but hopefully help others out too. Just spent a couple hours or more combing over it.
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=14482&p=218275&hilit=myth#p218275
The 6x10 winding won't really have any more torque than the 7x9 or 9x7 windings. You'll only get marginally more torque off the line and at a stall because the controller and phase lead losses will be somewhat less, but the effect is going to be pretty small, and can be negated with the faster winds by using heavy 10 or 12 AWG phase wire between your controller and the motor. As soon as you reach any appreciable speeds, then the slow 6x10 winding would have LESS torque than the faster windings for a given controller/battery combo.
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=24593&p=381600&hilit=myth#p381600
Hey Ken, as with all cases of the same motor option with just a different winding, if you are going up a hill where both motors are running the controller at the current limit, then you will get a marginal amount more torque from the slower motor due to 2nd order effect. This is exacerbated a bit by the fact that the HT3525 has a slightly higher copper fill factor than the HS3540 (63 strands vs. 60 strands). However, if the hill is not steep enough to cause the controller in the low speed motor to run at its current limit, then the higher speed motor will do the climb faster hands down.
If the myth continues that the slower speed motor winding leads to a higher torque motor, then ARRG I will want to roll in a grave. Crystalyte is not doing the scene a favour by using a High Speed / High Torque naming convention. It should be HS/LS for high speed, low speed. Since speed is already implied by the last two digits (40 and 25 kph respectively), then it's redundant anyways and H3540 and H3525 would be better.
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=7891&p=980986&hilit=myth#p980986
You'll notice that (ableit after some lobbying) Crystalyte is no longer referring to the motors as HT3525 and HS3540, but just H3525 and H3540? The original scheme with HT supposedly meaning "High Torque" and HS supposedly meaning "High Speed" was only propagating this same misinformation that the different windings result in different motor torque capabilities, and that there is a tradeoff between speed and torque. The H3540 and H3525 motors are wound differently, yes, and they are both fundamentally capable of exactly the same speeds and torques, it's just that the 3540 winding does it at a lower voltage and higher current than the 3525.
Justin
https://endless-sphere.com/forums/viewtopic.php?f=2&t=64907&p=984783&hilit=myth#p984783
John answered this pretty well but there are a few additional points I'd like to make. One is that the Crystalyte motors do NOT necessarily all have the same copper fill, and usually the very fast wind motors end up with a lower stuffing because of the physical challenge to deal with hand winding a huge parallel strand count. So I'm pretty sure that the H3548 is this way, much like how the Crysatlyte 5303 had a lower copper fill than the 5304 because they used the same stranding but just did 3 turns instead of 4 turns. This is where the "X x Y" designation, confusing as it is, at least has some benefit that you can see the actual total copper strands. So the Nine Continent 7x9 windings clearly has a bit more copper than the 10x6, (63 strands vs. 60) so you'd expect somewhat better torque all else, but the 9x7 was identical.
When you compare two motors that do have the same fill, like the slower 7x9 with the faster 9x7, you still get a difference in the torque output off the line, because the faster winding motor needs more current to produce the same torque, and outside the motor, more current means more losses in the motor controller and motor phase leads (but not the battery leads, as the battery current stays the same).
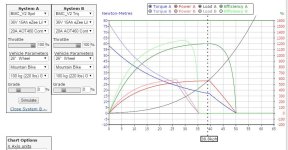
Here for instance is a comparison with the slow wind H3525 and the fast wind H3540, using a controller with 50 mOhm combined mosfet + lead resistance. Clearly the actual torque output at low speeds is about 10% higher on the slow motor:
Simulator Comparison, 50mohm.jpg
Simulator Comparison, 50mohm.jpg (103.43 KiB) Viewed 1230 times
Now replace the controller on the Faster 3540 winding with one that has fatter gauge wire so that it's only 10mOhm of resistance, and you can see that the torque difference between the two systems almost completely vanishes
Simulator Comparison, 10mohm.jpg
Simulator Comparison, 10mohm.jpg (110.13 KiB) Viewed 1230 times
Hopefully that gives some clarity on why you do both in practice and on the simulator see more torque with the slower motors. It's not that the fast motors produce less torque, but as a system with the same controller and phase wiring gauge then no doubt the motor that draws fewer amps will have less losses outside the motor, and that means more total power flows into the hub.
To me, an apples to apples comparison means that when you select a low turn motor, you are running at a lower voltage and higher current in general, so your phase wire gauge, controller mosfet resistance etc. should scale down accordingly so that the external losses are the same. In that apples to apples sense, motor winding really makes no difference as the graph above shows. The blame for lower torque with the fast motor does not lay in the motor, but in the controller and external wiring.
Justin in a youtube video, by Electric Bike Review Youtube blogger/reviewer.
https://www.youtube.com/watch?v=IxB2j-egWcQ
@ 6:00 and @ 7:50
@11:30 legal and @12:00 power @12:15 cont. amp and rpm.
@18:00 Battery cycles, SOC (Dont charge fully, but to 80% or 90% battery length increases)
@21:00 BMS phantom draw
@27:00 Bosch charger 3 pin, just need 5V to hack and 5.3A charge max.
@29:00 Ah consumed, rather then remaining.
@30:00 skateboards
@43:10 - The old store location, CA,
Video on water ingress
https://www.youtube.com/watch?v=gwlbAJLzI_w
This is more for me, but hopefully will help others out.
I will reserve a few spots for other "Guru" quotes.