
While I don't know for sure, I would guess that the inverter, as long as it is properly cooled, could do whatever power level it is built for, continuously. The original motor might not handle it continously (usually that is only if it doesn't have proper cooling), but the controller probably could.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Yet another Lebowski + Honda IMA inverter & step-by-step
- Thread starter marcexec
- Start date
Pyclanmot
1 mW
- Joined
- Feb 5, 2023
- Messages
- 13
Да I squeezed more from it and everything is fine, the inverter works up to 250В And it is capable of delivering up to 30 kW without problems, but with a nominal value of 20 kW for sure for a long timeВ основном со спецификациями Honda IMA....
Из того, что я могу найти (не все включено), инвертор рассчитан на «вспомогательный» двигатель мощностью 10 кВт ... для меня это означает прерывистый режим работы; в то время как на велосипеде MH602 будет работать в непрерывном режиме (10k/30k пик)... ?? IDK... кажется, что IMA недооценен для двигателя Enertrac??
marcexec
1 kW
Controller is re-installed on the bike after sealing and additional connectors (see 7).
I did an extended test run (emulated commute on Sunday evening, up to 90km/h and 20°C->~40°C in the uphill leg) and deemed it safe to commute for real today. See my build thread as well.


However I'm still struggling with the launch performance. Once it reaches 15 km/h and FOC kicks in it's smooth and seems to deliver full power up to the configured limits.
Post initial configuration with Roger the journey was as follows:
Since then I tried to tweak the transition:
I might try calibration based on 250A next and a phase current of 190-200A.
Edit: tried the 250A, autocomplete then 190A phase current settings this morning. Worked OK, but the transition has become more "rough" and it conked out once (only) on an incline.
Further tuning of my setup starts on this post in my build thread
I did an extended test run (emulated commute on Sunday evening, up to 90km/h and 20°C->~40°C in the uphill leg) and deemed it safe to commute for real today. See my build thread as well.
However I'm still struggling with the launch performance. Once it reaches 15 km/h and FOC kicks in it's smooth and seems to deliver full power up to the configured limits.
Post initial configuration with Roger the journey was as follows:
- transition to FOC was rough & unreliable at 1500 eRPM
- dropped phase current from 300 to 150A, re-autocompleted at 200A (for higher error currents) and items further down then just reduce phase for this tweak. Note battery current is limited at 150A due to fuse and contactor ratings.
- consecutitvely raised i\R from 53 to 90 mOhm, which got me going
- I have it now at 175A and 100 mOhm, which is still reliable:
Code:
version:2B0_
0x019A 0xE000 0xFFFF 0xFFFF 0x02C8 0x0003 0x4F80 0x000F
0x66B0 0x0000 0x0000 0x0000 0x0000 0x0000 0x017E 0x0000
0x00E9 0x0705 0x01C1 0x0400 0x0400 0x000E 0xFFDA 0x41EC
0xFFE2 0x5517 0xFFFF 0x08F2 0x00BA 0x0396 0x044E 0x0AA4
0x00E9 0x0150 0x0348 0x0026 0x01A4 0xFF8F 0xFFB0 0xE4D8
0xE86C 0x08F3 0x16F7 0x7FBC 0x7D2E 0x0010 0x795E 0x0000
0x4CCC 0x0018 0x0000 0x01E0 0xFFFF 0xB334 0xFFE8 0x0000
0xFE20 0x0000 0x4CCD 0x0018 0x0000 0x01E0 0xFFFF 0xB333
0xFFE8 0x0000 0xFE20 0x05B8 0x02C4 0x0064 0x0017 0x36CF
0xFF00 0x3A37 0x9033 0x6A37 0xEA37 0x1033 0xBA39 0xFF00
0x1122 0x0026 0x000B 0x0005 0x00C2 0x0000 0x0000 0x051E
0x028F 0x0400 0x0400 0x0400 0x085D 0x0357 0x0093 0x042D
0x0008 0x0D1A 0xFFC0 0x08F2 0x1000 0x0000 0x0000 0x0000
0x0000 0x0000 0x00BB 0x02AF 0xFFFF 0xFFFF 0x147B 0x0106
0x118E 0x05DA 0x0578 0x0258 0x0064 0x0004 0x0004 0x000E
0x0298 0x0003 0x0000 0x0078 0x0000 0x0000 0xFFFD 0x0000
0xFF88 0x0000 0x0000 0x0005 0x0000 0x0064 0xFFFB 0x0000
0xFF9C 0x000C 0x0000 0x00F0 0xFFF4 0x0000 0xFF10 0x0619
0x01D3 0x08C7 0x004D 0x014E 0x01D3 0x002E 0x0010 0x0E10
0x07D0 0x03B6 0x6000 0x0624 0x0074 0xBC10 0xA9A6 0x0803
0x8600 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x00A0 0xFFFF 0xFFFF
0xFFFF 0xFFFF 0xFFFF 0xFFFF 0xFFFF 0x0052 0xFFFF 0xFFFF
0xFFFF 0xFFFF 0xFFFF 0xFFFF 0xFFFF 0x0001 0x0000 0x0005
0xA000 0x3CA8 0x0038 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0xFFDA 0x41EC 0xFFE2 0x5517
0x6C1C 0x010E 0x2800 0x098A 0x0000 0x0CA8 0x005F 0x003E
0x0A80 0x1062 0x0285 0x0206 0x0000 0xFFF8 0xFFDA 0x41EC
0xFFE2 0x5517 0xDB91 0x0005 0x8000 0x059D 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0xFFDA 0x41EC 0xFFE2 0x5517 0x059D 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000 0x0000
0x0000 0x0000 0x0000 0x0000 0x0000 0x0324 0x0648 0x096A
0x0C8C 0x0FAB 0x12C8 0x15E2 0x18F9 0x1C0B 0x1F1A 0x2223
0x2528 0x2826 0x2B1F 0x2E11 0x30FB 0x33DF 0x36BA 0x398C
0x3C56 0x3F17 0x41CE 0x447A 0x471C 0x49B4 0x4C3F 0x4EBF
0x5133 0x539B 0x55F5 0x5842 *Since then I tried to tweak the transition:
- D\f (erpm dr2 jump to dr3) from 1000 to 750, which is too low even on N\h (minimum # of cycles going from drive 2 to 3 = 5000), 900 is OK even on 2000 cycles.
- 190A phase is too much for a neat transition even at D\f of 5000 (still based on 200A)
- G\g (phase control loop, drive 2, 3rd order) autocompletes to 0.03 but as per Roger's recommendation is 0.3, tried doubling it to .6 to see if I get better acceleration under Drive_2 (Halls), but did not notice a difference, so reverted
- G\n (immediate motor phase step) autocompletes to 64 and was at 16 per Roger's recommendation (for hub motors), tried 8 (more "jumpy") and now 24, which causes a bit of humming but feels more responsive. This value seems to affect both Drive_2 and Drive_3 (FOC)
I might try calibration based on 250A next and a phase current of 190-200A.
Edit: tried the 250A, autocomplete then 190A phase current settings this morning. Worked OK, but the transition has become more "rough" and it conked out once (only) on an incline.
Further tuning of my setup starts on this post in my build thread
Last edited:
mk77
10 mW
you sure about that? 30kW seems like a lot for that little heat sink.... (i.e. and NO fan!)Да I squeezed more from it and everything is fine, the inverter works up to 250В And it is capable of delivering up to 30 kW without problems, but with a nominal value of 20 kW for sure for a long time
Do you know what FET's or BJT's are being used??
I would be interested in the Rsdon value.
They're IGBTs; I forget what p/n. Might be data in one of the links in my version of this thread.
mk77
10 mW
what does "it conked out" mean???.... Worked OK, but the transition has become more "rough" and it conked out once (only) on an incline.
what is "it" ? what happened?
mk77
10 mW
Intro:
...
Note that the board is designed to be used with a resolver, mine was "downgraded" by Roger for my motor.
I also use an Enertrac MHM602 Hub motor.
Am considering the IMA/Lebowski route.... but what does this "downgrade" entail? Tks.
kiwifiat
100 W
The board was designed for driving a Hyundai HSG IPM motor that has a resolver not HALL sensors. It is a straight forward job to remove the resolver to digital components to suit HALL sensors which are the native Lebowski supported rotor position sensors.I also use an Enertrac MHM602 Hub motor.
Am considering the IMA/Lebowski route.... but what does this "downgrade" entail? Tks.
mk77
10 mW
@marcexec: sorry for all the questions --> I don't mean to hijack your thread....
@kiwifiat: so ... If I eventually decide to go with an IMA/Lebowski .... is this "modification" something I would be required to perform (( I have the skills to do a mod but would need all the pertinent info )) or can the board be delivered with the mod already installed? THANKS!
@kiwifiat: so ... If I eventually decide to go with an IMA/Lebowski .... is this "modification" something I would be required to perform (( I have the skills to do a mod but would need all the pertinent info )) or can the board be delivered with the mod already installed? THANKS!
Pyclanmot
1 mW
- Joined
- Feb 5, 2023
- Messages
- 13
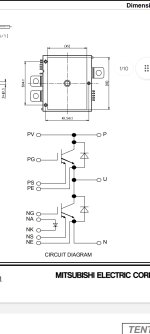
Ct300DJ0060
you sure about that? 30kW seems like a lot for that little heat sink.... (i.e. and NO fan!)
Do you know what FET's or BJT's are being used??
I would be interested in the Rsdon value.
mk77
10 mW
please, you have a datasheet for that pn ???Ct300DJ0060
All my favorite parts suppliers return "no data".... it's like it doesn't exist
 ... could be a "HONDA specfic" part number too....?
... could be a "HONDA specfic" part number too....?A google search on it turns up some info
 news.thomasnet.com
news.thomasnet.com
Electric Power Module meets needs of hybrid, electric vehicles.
Electric Power Module meets needs of hybrid, electric vehicles. - Jun 06, 2011 - Powerex Inc.
MITSUBISHI ELECTRIC News Releases Mitsubishi Electric to Release Sample J-Series T-PM Extra Compact Type
Mitsubishi Electric Corporation announced today it has developed a new J-Series transfer molded power semiconductor module (T-PM) mainly for motor drive applications in electric and hybrid vehicles. Samples of the J-Series T-PM extra compact type will be released starting February 19.
www.mitsubishielectric.com
Pyclanmot
1 mW
- Joined
- Feb 5, 2023
- Messages
- 13
пожалуйста, у вас есть даташит на этот pn???
Все мои любимые поставщики запчастей возвращают "нет данных".... как будто их не существует

Attachments
mk77
10 mW
@Pyclanmot you tease so well...
marcexec
1 kW
Better experienced than describedwhat does "it conked out" mean???
what is "it" ? what happened?
It's basically when the controller detects overcurrent or another fault condition and falls back to Drive_1 / recovery trying to re-sync.
You abruptly lose power, often with a "clunk" sound/feeling. "It" is the motor controller setup, especially the configured parameters here.
I have braided sleeves coming that might clear up the sensors' signals, see my edits above about shielding and being able to change parameters easily. It's a slow learning curve plus you should be prepared to test methodically. Some sort of dyno setup would be ideal...
Edit: that being said it transforms the bike massively - the frustration comes with a decent reward, just delayed. Have a look at Eric's videos starting from this one:
Last edited:
Насколько я могу найти (не все включено), инвертор рассчитан на «вспомогательный» двигатель мощностью 10 кВт…
с помощью мозга OpenInvertor я получаю от этого инвертора мощность 45+ кВт на аккумуляторе 250 вольт в своей машине массой 1500 кг. более того, я проверил этот инвертор от 500+ вольт и он работает нормально!
Igbt 600v 300a.Знаете ли вы, какие поляковые или биполярные транзисторы используются?
marcexec
1 kW
Based on a couple of weeks riding, I's say it's a very good option if you're happy to do some adjustments. Shield everything and bring the power up bit by bit. The responsiveness and smooth running is unreal compared to the Kelly I had before. I haven't even tried field weakening and regen yet...@marcexec: sorry for all the questions --> I don't mean to hijack your thread....
@kiwifiat: so ... If I eventually decide to go with an IMA/Lebowski .... is this "modification" something I would be required to perform (( I have the skills to do a mod but would need all the pertinent info )) or can the board be delivered with the mod already installed? THANKS!
Sorry to derail your thread further, but:

Do you mean it is possible to use a non-UVW/ABC-hallsensored motor with the Lebowksi, by adapting the sensor system the motor has (assuming the motor itself is still UVW 3-phase)? If so, does this include being able to adapt a SIN/COS position sensor?
(I feel like I may have asked this or something similar somewhere else, but I couldn't find it; maybe I just thought about it?)
I ask because I still have this powerchair motor:
 endless-sphere.com
endless-sphere.com


that I'd love to drive with this system (once I finish building mine); if it works I would get a second one (and possibly a third) to use for a future version of the SB Cruiser trike, since they are easy to mount on the trike frame, and I can make "normal" wheels to bolt to them (or even use as a kind of middrive) rather than having the motor as part of the wheel.
I got lost following the chain of posts for this part....The board was designed for driving a Hyundai HSG IPM motor that has a resolver not HALL sensors. It is a straight forward job to remove the resolver to digital components to suit HALL sensors which are the native Lebowski supported rotor position sensors.
Do you mean it is possible to use a non-UVW/ABC-hallsensored motor with the Lebowksi, by adapting the sensor system the motor has (assuming the motor itself is still UVW 3-phase)? If so, does this include being able to adapt a SIN/COS position sensor?
(I feel like I may have asked this or something similar somewhere else, but I couldn't find it; maybe I just thought about it?)
I ask because I still have this powerchair motor:
Powerchair Direct Drive Brushless Motor (High-Torque)
A friend dropped by tonight with an interesting motor. It is from a powerchair, and the wheel bolts directly to it. Normally it would run at less than 200RPM, on 24V SLA, for a few MPH on a small-diameter wheel, but the manufacturers have apparently tested it up to 65MPH on the same size...
that I'd love to drive with this system (once I finish building mine
marcexec
1 kW
@kiwifiat designed the board I have, but I'm pretty sure it can take a resolver input as @eric1565 uses a Hyundai/Kia HSG starter generator: Hyundai/Kia HSG - openinverter.org wiki. The circuit is just jumpered out for me as I only have (misaligned) Halls.Sorry to derail your thread further, but:
I got lost following the chain of posts for this part....
Do you mean it is possible to use a non-UVW/ABC-hallsensored motor with the Lebowksi, by adapting the sensor system the motor has (assuming the motor itself is still UVW 3-phase)? If so, does this include being able to adapt a SIN/COS position sensor?
(I feel like I may have asked this or something similar somewhere else, but I couldn't find it; maybe I just thought about it?)
I ask because I still have this powerchair motor:
View attachment 341972Powerchair Direct Drive Brushless Motor (High-Torque)
A friend dropped by tonight with an interesting motor. It is from a powerchair, and the wheel bolts directly to it. Normally it would run at less than 200RPM, on 24V SLA, for a few MPH on a small-diameter wheel, but the manufacturers have apparently tested it up to 65MPH on the same size...
View attachment 341973
that I'd love to drive with this system (once I finish building mine
kiwifiat
100 W
The IMA board has a resolver to HALL converter that is designed to support the type of resolvers found on automotive ev motors like the Hyundai HSG, Nissan Leaf, Fiat 500E/SMART ForTwo E drive that look like this:Sorry to derail your thread further, but:
I got lost following the chain of posts for this part....
Do you mean it is possible to use a non-UVW/ABC-hallsensored motor with the Lebowksi, by adapting the sensor system the motor has (assuming the motor itself is still UVW 3-phase)? If so, does this include being able to adapt a SIN/COS position sensor?

The type of resolver your motor has looks more like a RLS type that won't work out of the box but could be made to work with a change to the firmware. The easiest option would be to change the encoder on your motor to the type that outputs HALL type signals that would work with the Lebowski controller.
На плате IMA имеется преобразователь резольвера в HALL, предназначенный для поддержки типов резольверов, используемых в автомобильных электродвигателях, таких как Hyundai HSG, Nissan Leaf, Fiat 500E/SMART ForTwo E, которые выглядят следующим образом:
View attachment 342571
Тип резольвера вашего двигателя больше похож на тип RLS, который не будет работать «из коробки», но его можно заставить работать с изменением прошивки. Самый простой вариант — заменить энкодер на вашем двигателе на тип, который выводит сигналы типа ХОЛЛА, которые будут работать с контроллером Лебовски.

Я сделал эти универсальные платы на одном чипе. достаточно одного вращающегося магнита, и эта плата выдает от 1 до 7 пар полюсов сигналов Холла или сигнал A/B/Z. очень легко монтируется на различные двигатели с резольвером.
beggernator
1 µW
Hi.The IMA board has a resolver to HALL converter that is designed to support the type of resolvers found on automotive ev motors like the Hyundai HSG, Nissan Leaf, Fiat 500E/SMART ForTwo E drive that look like this:
View attachment 342571
The type of resolver your motor has looks more like a RLS type that won't work out of the box but could be made to work with a change to the firmware. The easiest option would be to change the encoder on your motor to the type that outputs HALL type signals that would work with the Lebowski controller.
Firstly, awesome thread, thanks for making the steps so clear.
I have a Honda ima inverter identical to this and am planning on running a hyundai HSG I have with a 20s battery initially. upping to a 48s battery once operating well. (essentially the same as erics build.)
@kiwifiat Sorry if this a question with an obvious answer.
In this thread I see a newer version of the Lebowski board you designed that looks to be designed to drop directly onto the standoffs of the IMA inverter.
looking through other threads the best I have been able to find is the small Bobc board style. Not the one like is used in this thread.
As you mentioned the HSG has a resolver exactly like pictured. Ideally I would like to use this as directly as possible but I could do similar to eric with a resolver swap if needed.
Basically I am looking for where best to find more information, i had a look on your YouTube channel and your post history but I failed to track down what I was after.
Thanks
Tom.
mxlemming
100 kW
- Joined
- Jul 17, 2020
- Messages
- 1,122
This is quite interesting. Over in VESC world there are endemic problems with hall sensor to sensorless transition as well. In my code I experienced this and tried to sidestep the issue by using the sensors to preload the sensorless... It's very interesting to see Lebowski has a very similar sounding issue with transition.9) FAQ, tuning tips, snippets andeducational face palmslessons learned
Input welcome!
FAQ
Tuning tips
- f_sample as mention in threads and documentation is h) loop sample frequency: in menu A, and should be at least 24kHz for good operation.
- Drive modes are as follows:
- Drive_0 - startup/enabled
- Drive_1 - Recovery (after errors)
- Drive_2 - Sensored (e.g. Halls)
- Drive_3 - FOC operation
- hall sensor calibration is done without load, but the subsequent tuning best done under load (i.e. driving). To save the collected data (Hall sensor stats as displayed in L\#) you must enter Setup mode after a (test) run! The data is lost if you just turn the controller off. Thus the recommendation for a button mounted on the handlebar/dash.
- if the jump from Drive_2 (Hall) to Drive_3 (FOC) fails or is rough, the first step is to increase the transition eRPM (D\f) temporarily to give you a bigger window to tune Halls first. The transition can then be smoothed further by giving the controller a bigger "window" through an increased (H\b) (dr2: speed filter 50% step response time [ms]). I went from 50 (Hall default) to 225, note 200 is the default under sensorless start.
- "Conking out" (i.e. fallback to Drive_1 due to e.g. an overcurrent error) in Drive_2 after increasing phase amps can be partially addressed by autocompleting on higher phase amps, which calculates a higher B\G value and then dropping down again.
This reduces your margins of error! See my build tread as well.
Makes me think it's some fundamental property of motors rather than an actual controller issue and that the problem is just masked rather than fixed by "tuning". Possibly at the expense of performance in each region.
I wonder if @Lebowski has any insight into this.
Similar threads
- Replies
- 64
- Views
- 15,363
- Replies
- 159
- Views
- 30,615