On the lowest gear on the Nexus and the highest assistance level on the Bafang as I recommended, the bike goes down to ~8km/h. Still ~twice faster than walking, but he'd like to go a bit faster (15km/h ?) to cut down on commuting time.
Fully loaded, the bike is around ~200kg/440 lbs.
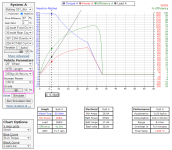
Given those, and assuming 26" drive wheel and the gearing 2:1 from motor to drivetrain and 42/30 from there to wheel based on your simulation link, then a 10% grade with no pedalling (to determine motor-only power required), the bike cannot go faster than 0.6kph, even though your simulation has a ~750w controller.
If I add in 100w of human input it'll go up to 6.3kph, and takes 639W (17.4A) from the battery, and 268W from the motor. Lowering the gearing (which usually slows it down) to 42/34 increases speed to 8.1kph, and takes 731W (20A) from the battery, and 377W from the motor. Both overheat the motor in about 4 minutes, using up 102Wh/km and 90Wh/km respectively, which if it didn't overheat would give around 9km of range in either case with the 36v 23Ah battery listed. If it's a lower capacity battery it would have even less range.
Our ebike motor simulator allows you to easily simulate the different performance characteristics of different ebike setups - with a wide selection of hub motors modeled, and the ability to add custom batteries and controllers and set a wide variety of vehicle parameters you'll be able to see...

ebikes.ca
Using the same simulation, modified for a 40A (1500w) controller instead, it provides 15.9kph under the same conditions, but overheats the motor twice as fast, and pulls twice as much power / current from the battery.
Our ebike motor simulator allows you to easily simulate the different performance characteristics of different ebike setups - with a wide selection of hub motors modeled, and the ability to add custom batteries and controllers and set a wide variety of vehicle parameters you'll be able to see...
ebikes.ca
I'm guessing this simulation is not accurate for your specific motor, but it's hard to simulate middrives without knowing all the characteristics of it (the RPM/V of the internal motor itself, the gearing ratio from it to the input of hte bike's drivetrain, and then the gearing ratio from the front of the bike's drivetrain at that point to the wheel itself, including any IGH gearing. I don't know those characteristics for your bike or drive system (I think the drive system info is available somewhere here on ES but I have not looked for it yet).
So without that info, then a guesstimate is that if you can get 8km/h out of the existing system under the condtions you have now, then it should take around twice the power to get almost twice the speed (not counting the higher air resistance at the higher speed, since it's still slow enough to make that negligible).
So, in theory, if you have a system only providing 250W that does 8km/h, an otherwise identical system providing 500w should do at least close to 15km/h.
Since it could take at least twice the battery power as the present system (for situations exceeding the present power requirements, like this hill), the battery has to be able to handle that and have the capacity to provide that doubled power for at least as long as it does now, assuming it is presently sufficient.
What are the battery specifications? Meaning, what is the Ah capacity (or Wh), and what is the continuous current limit it can handle? You'll need to know those to know if it can be used with a higher power system or not.
How many Ah (or Wh) does it presently take to cover the trip distance? If it is more than half of the battery capacity, the battery may require a stop to recharge along the way, if the doubled power usage lasts long enough.
If you don't know the Wh/Ah usage, do you know what percentage of the battery is used at the end of the trip? That can give you a guesstimate of whether you need a bigger (or additional) battery.