John in CR
100 TW
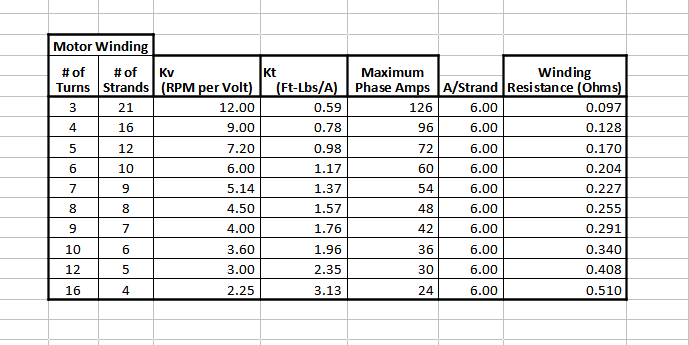
Balmorhea said:john61ct said:Top speed will not be the same.Balmorhea said:36V 20A on a 4 turn motor produces exactly the same torque, speed, heat, power, and efficiency as 72V 10A on an 8 turn motor.
And getting higher torque at the lower speed ranges, steeper longer hill with more weight?
More turns/lower current can result in the same speed as fewer turns/more current. Ultimately it's not about how many volts or amps you use, but how strong a field you put on the stator.
It's much easier to get low speed torque from high winding counts, because you don't have to worry about overwhelming the phase wire size, plugs, etc.; and you don't have to use a goofy controller to deliver huge currents at low voltage. But in principle, you could do the same job with a low turn count motor. It would just take an inconvenient/improbable kind of electrical power to accomplish it.
The reason I think it's dumb to go slow with a fast winding, like John in CR often recommends, is the same as why I think it's dumb to use high voltage and a slow winding to go normal speed. It means using a special/expensive/unusual controller and battery when you could simply use the regular cheap and easy kind.
Who can find the one correct statement quoted above? It's time for the mods to start squashing this windings nonsense that has suddenly grown so prevalent again on the forum.