Kepler
10 MW
The arduino would be a great solution. Unfortunately my experience with arduino is limited but if anyone is interested in designing an arduino solution that will do the job, it would be great for the ES community.
You would need the device to do the following steps
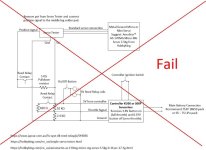
Start drive sequence:
1) Activate assist through a push button (a wireless button would be ideal but not sure if there is a solution currently available)
2) Servo drives full sweep and allows the motor to make light contact with the tire.
(Due to the sensorless nature of the controller, its good to have the motor turning before the motor is activated)
3) Once the servo has gone full travel, Throttle signal is sent to the controler (0.8V = zero throttle 3.8V = full throttle)
Throttle should be ramped from 0.8V to 3.8V over a 2 second period (time period might need tuning)
Stop drive sequence:
1) Activation push button is released
2) Servo drive full opposite sweep to fully reduce tension on pull cable.
3) Throttle signal is ramped down from 3.8V to 0.8V over a 2 second period
Anyone who can design and build an operational microprocessor drive activation unit that they are then willing to build and sell or alternately make the design and code available to the ES community gets a free Drive Mech sent to them.
You would need the device to do the following steps
Start drive sequence:
1) Activate assist through a push button (a wireless button would be ideal but not sure if there is a solution currently available)
2) Servo drives full sweep and allows the motor to make light contact with the tire.
(Due to the sensorless nature of the controller, its good to have the motor turning before the motor is activated)
3) Once the servo has gone full travel, Throttle signal is sent to the controler (0.8V = zero throttle 3.8V = full throttle)
Throttle should be ramped from 0.8V to 3.8V over a 2 second period (time period might need tuning)
Stop drive sequence:
1) Activation push button is released
2) Servo drive full opposite sweep to fully reduce tension on pull cable.
3) Throttle signal is ramped down from 3.8V to 0.8V over a 2 second period
Anyone who can design and build an operational microprocessor drive activation unit that they are then willing to build and sell or alternately make the design and code available to the ES community gets a free Drive Mech sent to them.