A 63-74 doesn't fit the drive so forget that.
As long as you keep the kv under 280 and no greater then 6S LiPo or 7S 18650, you will get a good result regardless of it being a 63mm motor or 50mm motor.
When on the bike, calculated speed is only what you will get close to if you can throw enough amps at it. I use controllers with a current limit of around 14A. This means a 280 kv motor will have a similar real world max speed similar to a 200kv motor because its the current limit that is the governing max speed factor. Also real world torque feels very similar.
With regards to torque, amps-in is the main governing factor, not kv which is why 14A on a 200kv motor or 280kv motor feel quite similar. However, the 200kv motor will run cooler then 280 kv motor. Good news is that at 14A, heat isn't an issue in either case. You also find that a motor with a lower kv has a longer stator and as such is a physically heavier motor. Another reason why a low kv motor will run cooler.
The other governing factor is the speed controller's electrical RPM. The ebike controllers I am using have low electrical RPM capabilities. On 7S 18650, if free spinning, a 230 kv plus motor will cut out at full throttle on an ebike controller. However, under load this isn't a problem as the motor can never get to the electrical max speed anyway.
Different story if you use a non current limited RC controller though. This is where it is important to use match the kv to the speed you want to do more closely.
A vesc has current limiting capabilities so the sk3 6354 260kv motor will work fine.
I found these two motors the other day. Both would be a good fit for the drive.
https://www.aliexpress.com/item/Fre...ice=c&mtctp=&gclid=CKG7wqipttECFQsQvQodcjMKyg
https://www.aliexpress.com/item/fre...id=a1306095-143d-4fd1-9e1d-d078c6e341fb&tpp=1
There is a real cross over between skateboard stuff and friction drive stuff which is a good thing. It is really opening up choices for friction drives.
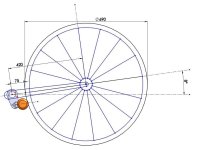
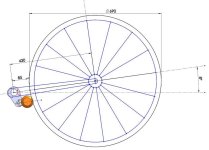
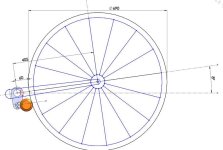
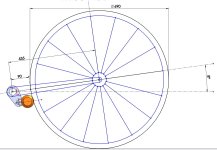
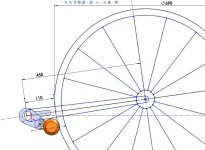
The reason why the cross over is there is because road speed of skateboard wheel is the same as the road speed of a friction drive motor on a tire regardless of wheel diameter.
Put another way, if you put 63 mm motor directly on the ground, against a 20" tire, or against 700c tire, the road speed for all 3 examples is always exactly the same. One of the very positive characteristics of a friction drive.



")