I am choosing to revive this thread instead of starting a new one. My interests are purely from an electrical efficiency standpoint, since my bike pictured below has both a 26" and 20" wheel anyway.
My Lynx recumbent and my friend's bikeE recumbent currently have an identical ebikeling 11.6Kv motor, and identical power meters. I have a 40 amp square wave controller, while he has a 26 amp sine wave controller. Also more obviously I have a 26" rear wheel vs. his 20" rear wheel. The simulator shows that at cruising speed the efficiencies and power draw differences are negligible. On the trails we ride there are enough crossroads (start and stop) to make his energy consumption about 80% of mine. You could argue that I'm getting out of shape :lol: and the 40 amp controller doesn't help, but thankfully the upright bikes we've road many times before always had similar power consumption. I think the real game changer is just the 20" wheel.
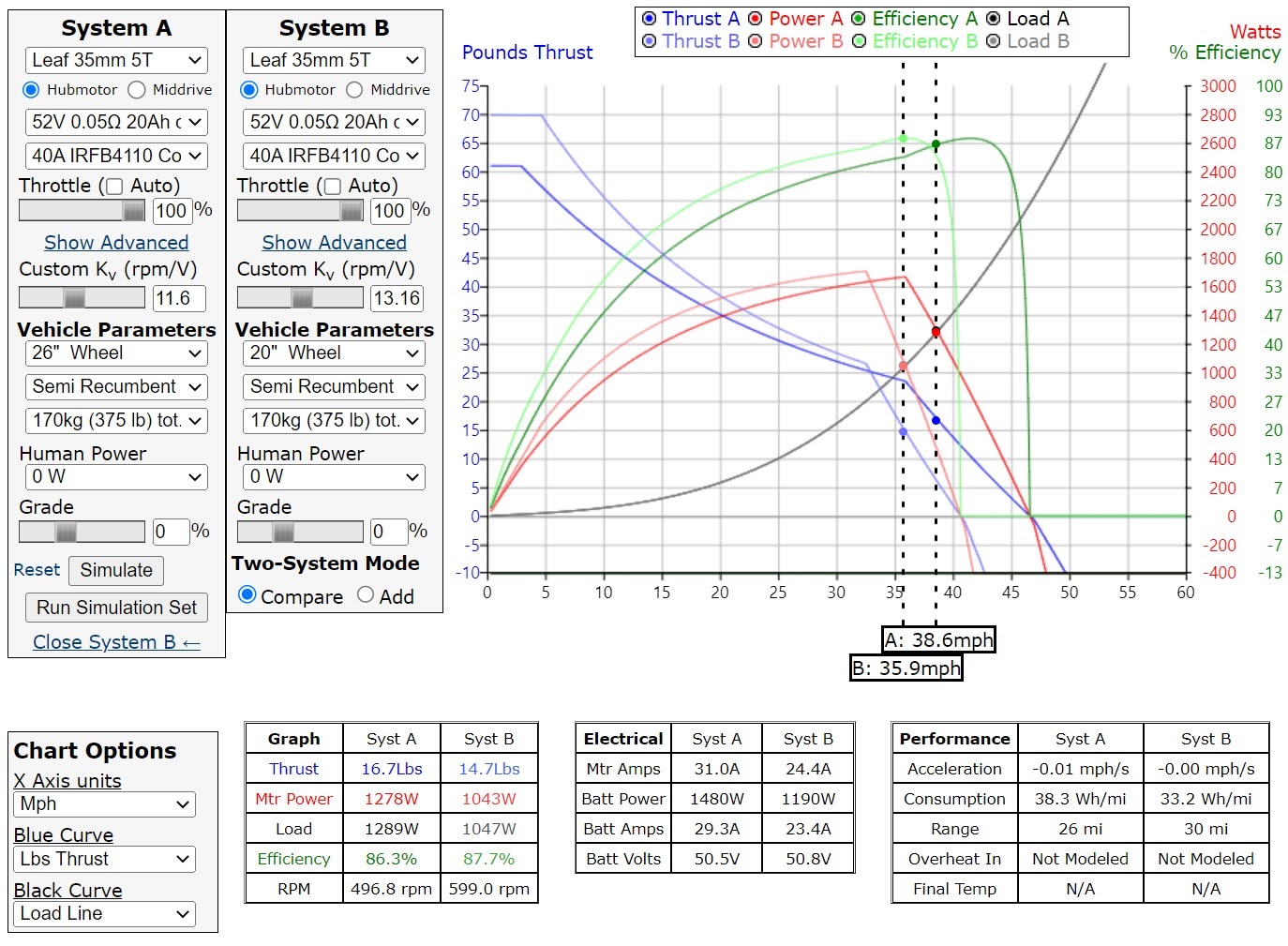
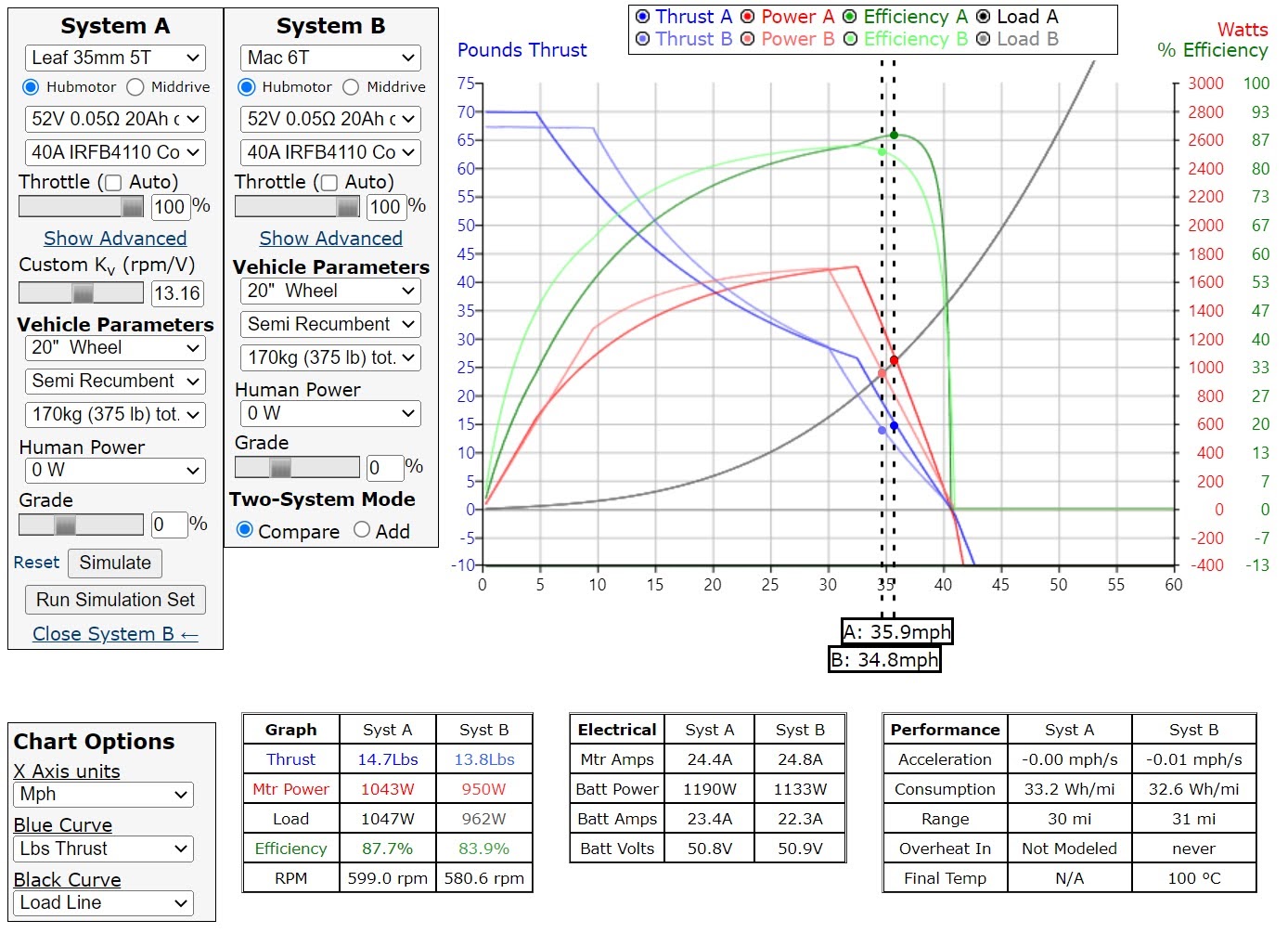
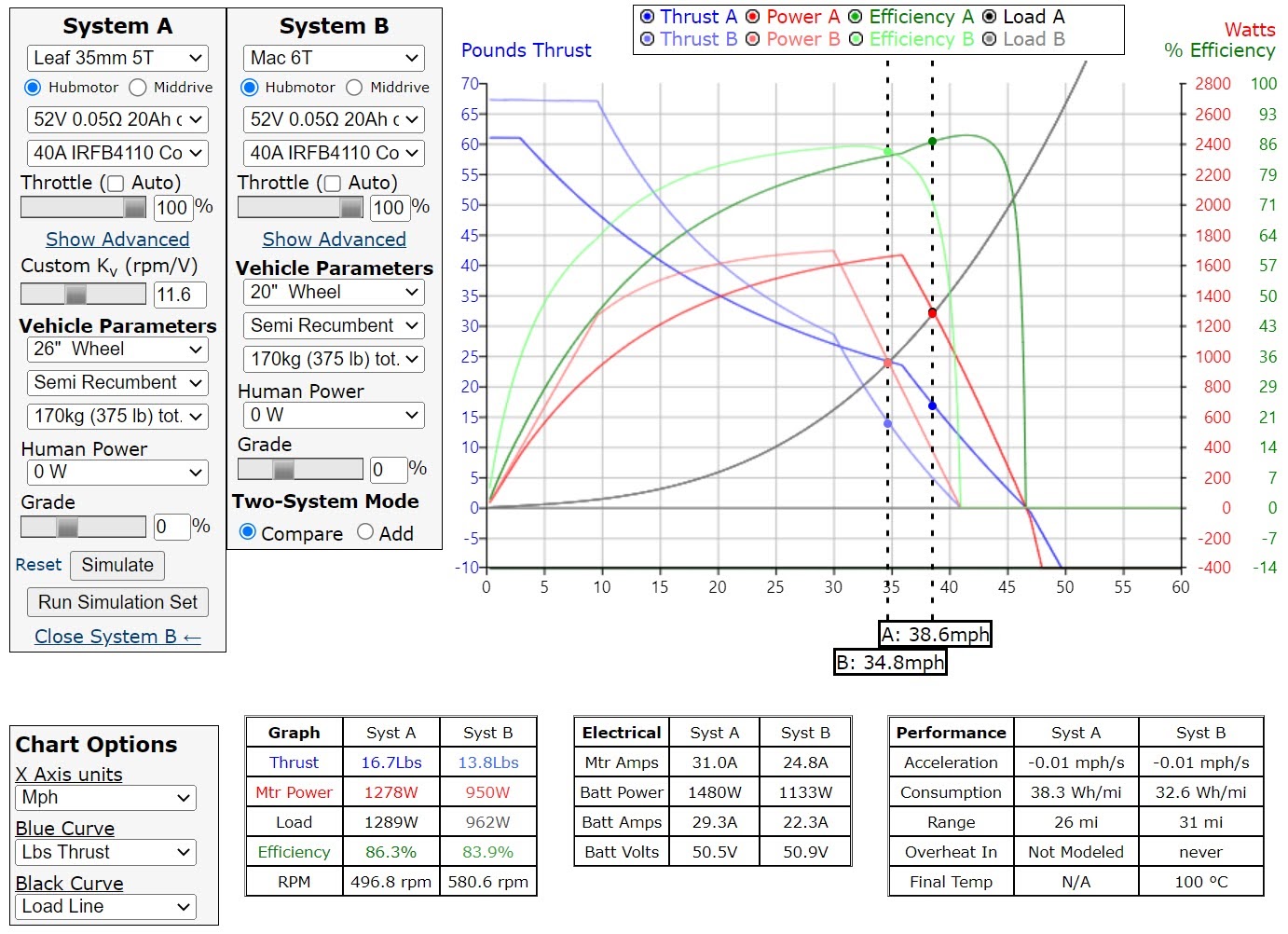
I originally planned my recumbent with a 20" front motor so that I could use an internal geared hub, similar to solarEbike's setup. The 26" rear 11.6Kv motor is in place because that's what I already had available to use. The first simulator image below suggests that a 4T 13.16Kv 20" front Leaf motor would be more efficient throughout at full throttle. Taking this concept further, a Mac 6T would be even more efficient yet, if they're even available with a 100mm front axle.
My question for Endless Sphere is can the Mac be more efficient than the Leaf even with the geared reduction sapping some of that efficiency? I may purchase a front motor and have a 2WD setup to test with, but I don't like the thought of geared reduction maintenance and noise. Also we keep finding broken 80mm spokes broken on the 20" radial bikeE setup. I assume we just aren't getting them tight enough...
My Lynx:
My friend's bikeEbike:
Current 26" ebikeling vs. Leaf 4T 20":
Leaf 4T 20" vs. Mac 6T 20":
Current 26" ebikeling vs. Mac 6T 20":