ornias
100 W
- Joined
- Jul 18, 2021
- Messages
- 172
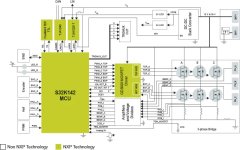
4πr^2 said:I'll work on getting set up on github and some pics. Looks like my motor is using an S32K142H controller
https://www.nxp.com/docs/en/data-sheet/S32K-DS.pdf
80V / 60A mosfets if anyone is interested:
http://www.hunteck.com/Datasheets/HGN036N08S_V1.0-061417.pdf
You my friend are getting a Beer if you're ever in my region of the world!
Interesting though:
So in the m500 they use 1 single 80v60s mosfet and in the m600 they use three.
i did some board research and I think, would be great if someone can confirm it, the MOSFET cooling is not very good. Hence they use multiple over-rated MOSFETS for the m600.
But more importantly, for 15194:2017 compliance they measure the temperature equilibrium of the single MOSFET, because it's not adequately cooled it means they can certify for 250w continues.
Why is this all interesting?
If we start to push more current for the m500, we could just add extra cooling to deal with the extra MOSFET load and be done with it.
But the m600 is definately capable for running the 2KW load that Luna puts through it by their shuntmod, assuming cooling is adequate.


")