I opened my QS165 encoder today..keep in mind that I have serial number #3000001 
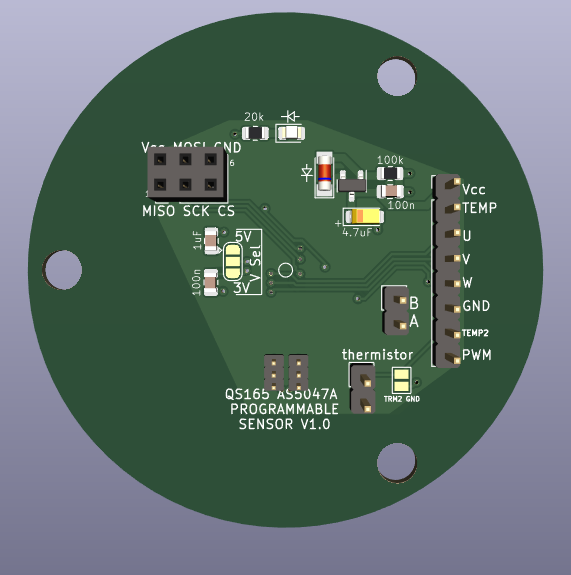
What I found to the chip is that it´s an ABI encoder, probably this one: http://www.jsuitech.cn/pd.jsp?id=22#_jcp=3_6
Googling only the first part of the chips number "6816 216" gave me this datasheet: https://datasheet.lcsc.com/lcsc/2010271836_Magn-Tek-MT6816CT-ACD_C879560.pdf
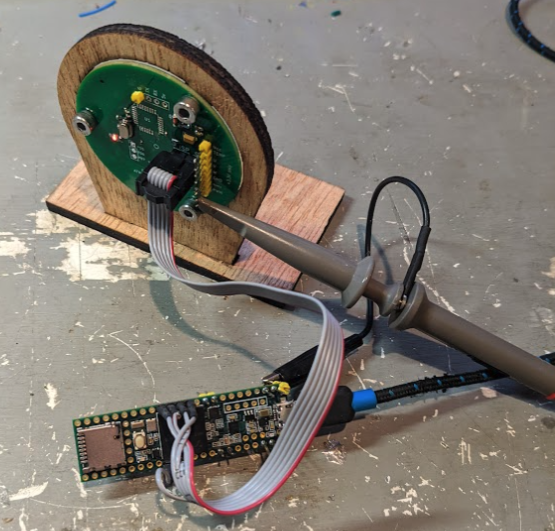
So I know, that ABI encoders are supported via VESC.. do you happen to know how I have to connect it?
Ideally, I could use the hall inputs but to my knowledge, these inputs are treated with pull-up/down resistors, so this might be an issue.
Iam gonna pair this motor with the new EBMX X-9000 and I don´t know how many ADC inputs it got...but if it´s only 2 then Iam gonna run into issues with my analoge throttle




What I found to the chip is that it´s an ABI encoder, probably this one: http://www.jsuitech.cn/pd.jsp?id=22#_jcp=3_6
Googling only the first part of the chips number "6816 216" gave me this datasheet: https://datasheet.lcsc.com/lcsc/2010271836_Magn-Tek-MT6816CT-ACD_C879560.pdf
So I know, that ABI encoders are supported via VESC.. do you happen to know how I have to connect it?
Ideally, I could use the hall inputs but to my knowledge, these inputs are treated with pull-up/down resistors, so this might be an issue.
Iam gonna pair this motor with the new EBMX X-9000 and I don´t know how many ADC inputs it got...but if it´s only 2 then Iam gonna run into issues with my analoge throttle