Hello!
I'm having a problem with this simple thing, which is'nt so simple afterall.
I'm trying to alter the PAS signal. Actually reducing it, so that hall sensor inside the motor would output proper signal. It's installed the same way as the hall-sensors that tell the motor position. (It's a motor that had controller and PAS integrated, but now only PAS)
What it does now, is that it just nudges a little forward, presumably because there's so many magnets(too high frequency).
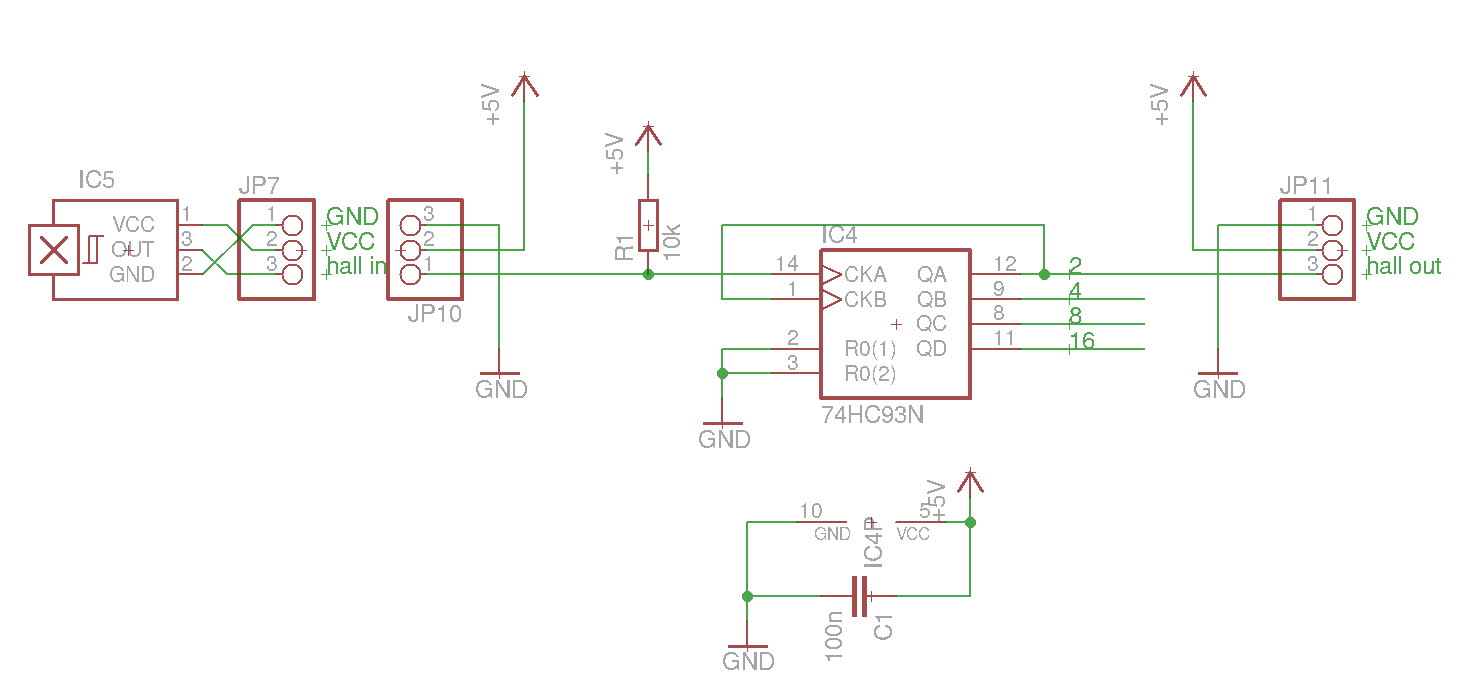
I know i could just use 74HC93(counter) etc. for doing this, but i want to make it adjustable with push buttons.
I made simple arduino code. It monitors when the hall is going low and counts until it can tell the controller to switch between HI/LO. The lost pulses is adjustable with two buttons.
The code is working when i try it on breadboard with LED and hall sensor, everything good, but when i put it to read from the motor hall and output to controller PAS input, it does absolutely nothing.
https://pastebin.com/nN3RvtNV
I tried also code that it feeds the controller a signal like (write HI, adjustable delay, write LO, adjustable delay), and it responds by spinning the motor momentarily because maybe too crude code, but proves that the chip can give signal.
I'm having a problem with this simple thing, which is'nt so simple afterall.
I'm trying to alter the PAS signal. Actually reducing it, so that hall sensor inside the motor would output proper signal. It's installed the same way as the hall-sensors that tell the motor position. (It's a motor that had controller and PAS integrated, but now only PAS)
What it does now, is that it just nudges a little forward, presumably because there's so many magnets(too high frequency).
I know i could just use 74HC93(counter) etc. for doing this, but i want to make it adjustable with push buttons.
I made simple arduino code. It monitors when the hall is going low and counts until it can tell the controller to switch between HI/LO. The lost pulses is adjustable with two buttons.
The code is working when i try it on breadboard with LED and hall sensor, everything good, but when i put it to read from the motor hall and output to controller PAS input, it does absolutely nothing.
https://pastebin.com/nN3RvtNV
I tried also code that it feeds the controller a signal like (write HI, adjustable delay, write LO, adjustable delay), and it responds by spinning the motor momentarily because maybe too crude code, but proves that the chip can give signal.