I have been running multiple scenarios with the rear all axle motor to see what the absolute continuous power is.
Peak power and efficiency occurs in a 20" wheel. The amount of power you can extract without overheating is pretty mad.
The high efficiency tells me it can take even more power than this.
View attachment 348067
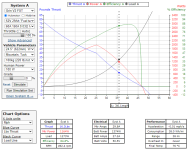
On a 29" wheel, our performance is subpar compared, maybe we can sustain 36mph but that's it.
View attachment 348068
Performance is pretty good in a 26" wheel. We can probably sustain 38mph.
View attachment 348069
So with this motor, the smaller the wheel, the better.
20" is way too small on a 26" MTB. You will have pedals hitting the ground issues.
22" has a problem where the tire would collide with vbrake posts in the 2.3 inch range.
24" puts the vbrake posts inline with the rim, so the tire is above the vbrake posts, and also in an area where you have more chainstay width. This is the perfect opportunity to use a 2.5" tire or larger, and technically have a 24.5" wheel.
Looks like this small size reduction would allow us to go pretty high speeds continuously with the fast wind.
So here's our 24.5" wheel size:
View attachment 348070
We could possibly push it to 40mph for periods of time since it handles 38.2mph so well.
With the standard winding, we are in a nice part of the efficiency band around 30mph.
View attachment 348066
The motor definitely has hot rod potential. 82 ft-lbs of torque from a 11lbs motor is pretty good. It's not a torque beast like the MAC, but it can at least shed the heat well enough to hit and maintain high speeds.
Looks like i'll be building a bike with one of these and a 24.5" wheel. Losing 0.75 inches or ~18mm of ground clearance vs the previous 26" wheels is a pretty reasonable loss for the continuous power gain.

") Lishui uses UART3 of the STM32F103 processor for the communication with the sensor.
Lishui uses UART3 of the STM32F103 processor for the communication with the sensor.