Bluefang
10 kW
That sounds like a very interesting amount of torque  1000amps would be very very do able if we can use multiple power phases/controllers. I think you said it was 48 teeth, that would be 8 controllers/lots of 3 phase connections.
1000amps would be very very do able if we can use multiple power phases/controllers. I think you said it was 48 teeth, that would be 8 controllers/lots of 3 phase connections.
I have almost go my hands on a small 1/4hp AC motor to test out and see if its as easy as i think it will be to run multiple controllers on a single motor and see if i can build a inrunner core similar to the one in the thread i linked. One idea i have had for the smaller inrunner core would be to 3d print it out of nylon as a test, hopefully use square magnets so i can mount them all up and then vacumm impregnate the whole core with a expoxy to add alot more strength and heat resistance. I have a friend with a large lath so i can smooth the center bore and outside to match the diameters needed and balance the core.
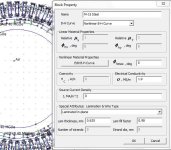
Weird ideas, no idea if any of it will work but i have never been one to plan it out. I could never learn Femm to do the design properly so keep up the great work with everything Arlo and sorry if i am moving your thread off track abit.
I have almost go my hands on a small 1/4hp AC motor to test out and see if its as easy as i think it will be to run multiple controllers on a single motor and see if i can build a inrunner core similar to the one in the thread i linked. One idea i have had for the smaller inrunner core would be to 3d print it out of nylon as a test, hopefully use square magnets so i can mount them all up and then vacumm impregnate the whole core with a expoxy to add alot more strength and heat resistance. I have a friend with a large lath so i can smooth the center bore and outside to match the diameters needed and balance the core.
Weird ideas, no idea if any of it will work but i have never been one to plan it out. I could never learn Femm to do the design properly so keep up the great work with everything Arlo and sorry if i am moving your thread off track abit.