Here's the catch:
Without knowing exactly what they specifically need to know, what they need to do, to make whichever controller you're getting do whatever function it is that it doesn't do now, it's pretty tough to say what to tell them.
If you can get them to tell you clearly what specific information they need from you to do the modifications, then we may be able to help you find that and provide it.
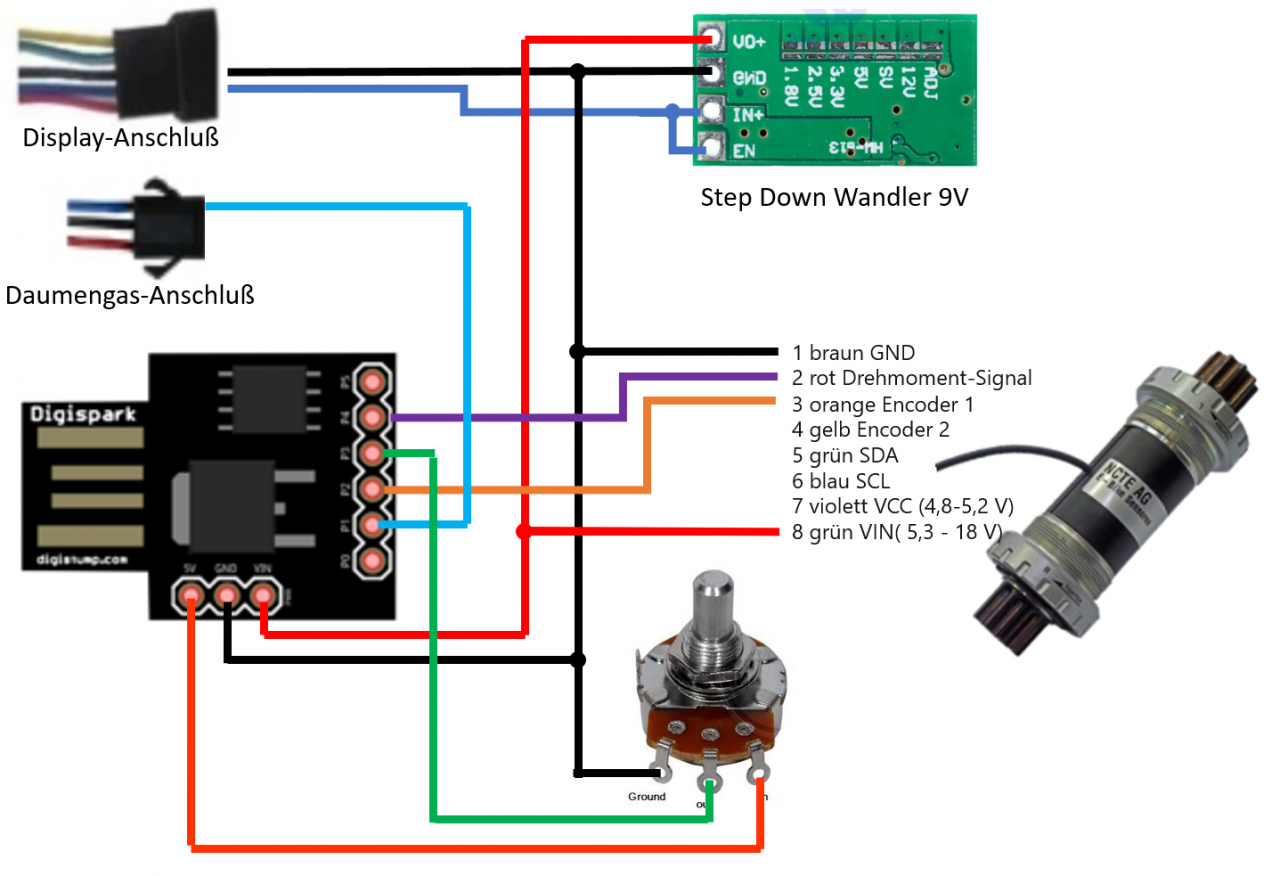
We know what the torque sensor does, and pretty much how it does it.
We don't know what Lishui knows already, and what they don't know. Or what they know but don't understand.
We don't know what the controller itself already does, and what it doesn't do, or how it is designed to do them. (partly because we don't know which of their controller designs they would be starting with to modify for your usage)
We don't know what they need to change, or how they are planning to change it. I would guess it is all in software, because the hardware probably already all exists to read the sensor.
We can guess some of it, but it's an engineering (and programming) change to add a control method to a controller that it does not presently support. Not necessarily a difficult one for the engineers that created it, but it would probably be for us. (not counting the people that wrote the open-source firmware for LiShui controllers / displays elsewhere in the forum--which, BTW, you may wish to look into to see if it already supports your desired sensor and application: https://endless-sphere.com/forums/viewtopic.php?f=30&t=106862 ).
And for us to really tell them exactly how to do this, we would need information they're not going to provide: We'd need to know how the controller already works, and what it can and can't do that your project needs it to do. This may not be hardware, but is almost certainly software in the controller that reads the device's outputs and converts it's output to what the controller needs to tell the motor what to do. It may even include having to write new menus for their display on the controller for calibrating the controller to the sensor initially and possibly repeatedly as the sensor varies over it's lifespan. I'm pretty sure they won't provide their code for us to figure out what to alter.
")
But they themselves, as the company designing and building these controllers, should easily be able to just take the information from the torque sensor company, along with your specifics on how you need it to do what you want your project to do, and modify their own hardware and software to support it.
Without knowing the details of your project and how you need it to do the job you are building it for, I think that there are a couple of probably simpler / more likely to lead to success paths if you'd like to pursue them or look into them:
If you are going to use the Lishui controllers, then if you use a compatible one to the OSFW discussed in the linked thread above, you can probably just skip the whole custom controller thing and get the right controller model and any other necessary bits to flash the OSFW on it, then setup the controller for the purpose you need it for. Before going down that road, I'd recommend reading that thread and it's linked pages to be sure it will do what you want, and if necessary posting your project requirements in detail on that thread and asking those working on it if it will do what you want.
Alternately, the CAv3 previously mentioned would probably add whatever functionality you need to any generic "dumb"throttle-only controller with no display/pas/etc.



![ATTACH]](/sphere/proxy.php?image=http%3A%2F%2F%5BATTACH+type%3D%22full%22+alt%3D%22dbsdb.png%22%5D324665._xfImport%5B%2FATTACH%5D&hash=0b82b025ddb1bc63331dee8bf46b57cc)