casainho
10 GW
- Joined
- Feb 14, 2011
- Messages
- 6,047
No, this test of energizing each coild/phase during 100ms each 1 second is done without looking to hall sensors.Eascen said:Sounds like a hall sensor issue still... have you tested each one?
No, this test of energizing each coild/phase during 100ms each 1 second is done without looking to hall sensors.Eascen said:Sounds like a hall sensor issue still... have you tested each one?
int main (void)
{
unsigned int duty_cycle = 250;
initialize ();
motor_set_current_max (2); // max average current of 2 amps
motor_start (); // initialize the needed interrupt and sets the outpus as needed
while (1)
{
motor_current_control (duty_cycle); // keep controlling the max current
}
}") --- see the video:
--- see the video:// Throttle config
#define THROTTLE_ADC_MAX 837 // 2.7V (rounded to lower so throttle will always get there)
#define THROTTLE_ADC_MIN 217 // 0.7V (rounded to higher)
#define THROTTLE_ADC_AMPLITUDE (THROTTLE_ADC_MAX - THROTTLE_ADC_MIN)int main (void)
{
unsigned int duty_cycle = 0;
initialize ();
motor_set_current_max (5); // max average current of 5 amps
motor_start (); // initialize the needed interrupt and sets the outputs as needed
while (1)
{
duty_cycle = throttle_get_percent (); // get throttle value
motor_current_control (duty_cycle); // keep controlling the max current
}
}Thanks!!liveforphysics said:Great job!!! I like it!
casainho said:I documented the hall sensors signals compared to phase signals on my KU63:
IM workin on some new files for Hardware design some might be usefull here.casainho said:This project is OpenSource and I can give write access to github for developers that want to collaborate. There are 3 main areas:
- hardware (design, assembly and test of the hardware)
- firmware
- software (Android app for control the controller over Bluetooth).
Torque, I guess is the answer. The throttle value only setups the PWM value.nieles said:what is controlled with the closed loop controller code? speed or torque?

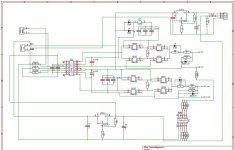
Thank you Arlo1. Is there a link for your project? I am "saving" the links on project page: http://smartebike.sourceforge.net/Arlo1 said:Here is my SCH file. Its a work in progress.
Lebowskies firmware is closed source. Yours power stage and Not simple BLDC controller are closed source? can you please clarify this (I am just interested to link/use OpenSource tecnhology).Arlo1 said:Here is my powerstage build thread. http://endless-sphere.com/forums/viewtopic.php?f=30&t=35387
Here is the Not simple BLDC controller thread I started. http://endless-sphere.com/forums/viewtopic.php?f=30&t=30851&hilit=not+simple+BLDC
ATM im using lebowskies chip because it seems to have everything I want for programing.
I never registered as "open source" but My not simple bldc, and powerstage threads are open source.casainho said:Lebowskies firmware is closed source. Yours power stage and Not simple BLDC controller are closed source? can you please clarify this (I am just interested to link/use OpenSource tecnhology).Arlo1 said:Here is my powerstage build thread. http://endless-sphere.com/forums/viewtopic.php?f=30&t=35387
Here is the Not simple BLDC controller thread I started. http://endless-sphere.com/forums/viewtopic.php?f=30&t=30851&hilit=not+simple+BLDC
ATM im using lebowskies chip because it seems to have everything I want for programing.
Ok, I expected a statement of intentionsArlo1 said:I never registered as "open source" but My not simple bldc, and powerstage threads are open source.
-- this are great news!!