BobBob said:
If both are the same MAC 10T but driven with different voltages, it will be partly the controller or wiring. Copper losses would be greater for higher current due to lower voltage to maintain the same overall power.
Solution thicker wire for the 36V motor? 15-20% seems a lot though and the motor getting hotter is strange.
hmm
Is is possible that with a 36V setup you are running the motor at lower RPM and higher torque for max power output and changing gear to suit?
Copper losses account for some but not all, and it happens with both controllers, each time swapped the Phaserunners were paired. 12AWG battery to Phaserunner (10") 14AWG to Hub (21"), 14AWG internal.
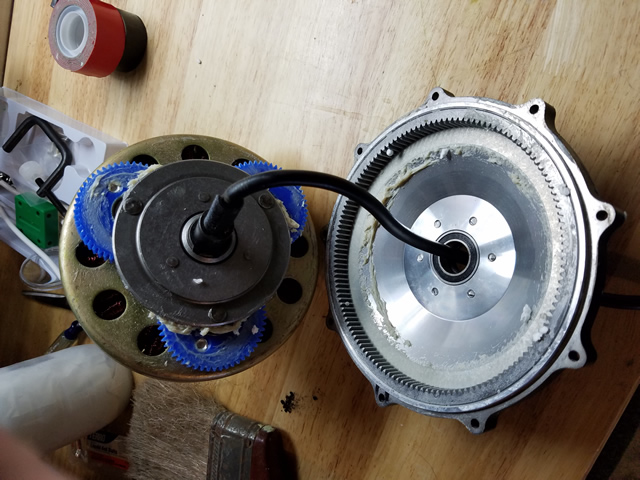
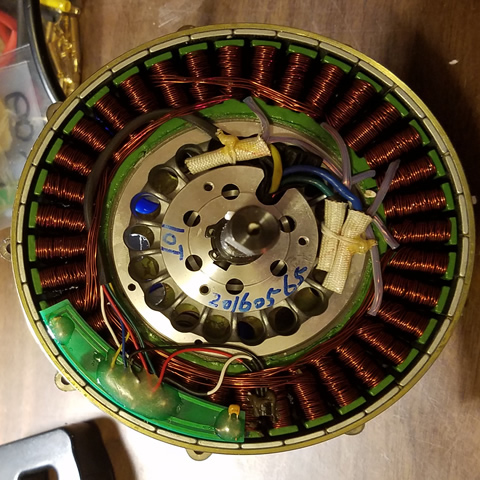
The MAC is like a Direct Drive with a 5:1 ratio. Here is the inside view:
This may drift a bit off the topic but its often overlooked between a MAC and DD:
With 36 poles and 5:1 gearing, the poles are switched 180 times per revolution ("Virtual Rotor Speed") . For a 26" tire that comes to 1 pole switch every .45" of travel. Compare that with a Direct Drive 48 pole (with larger OD & weight) of the same power rating, with a pole switch every 1.74" of travel. That shorter distance of pole switching increases efficiency and torque significantly.
The Efficiency Curve for a BLDC starts at 0 RPM, so if you throw 100 amps and the motor isn't turning efficiency is zero. Efficiency will continue to increase with RPM until the core approaches a "Soft Saturation" level where residual fields remain into the following switching cycle. Yep, its that simple.
The simulator is a great tool but it gives trend level data, sometimes quite accurate, sometimes not. I see that in just about every simulator out the from circuit design, to stress modeling to thermal modeling tools.