#
#
Situation - I feel some delay in the engine's response.
Hi all,
First of all, I would like to thank you again for the excellent work that Casainho has done. It is certainly the result of a lot of work and effort.
Secondly, the problems I detected are difficult to feel on flat terrain. It is necessary to carry out tests on inclined roads, at least with more than 6% inclination.
However, the problem also appears on flat terrain, however the kinetic energy makes it impossible to notice it. If you are interested I can publish a video where this situation is very visible.
My goal is to share this information with the forum to see if we can overcome this situation together
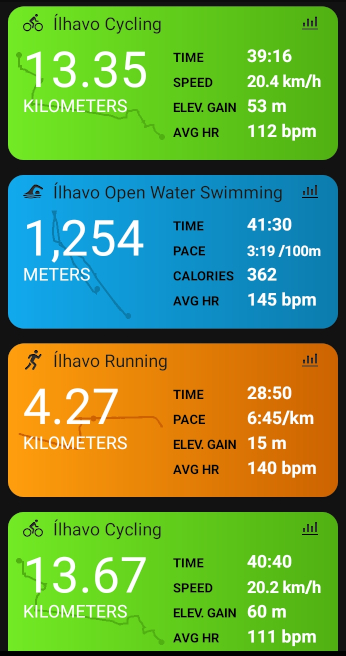
I have been doing tests and videos for about a month to try to understand the problem. I haven't even cycled because of the tests.
From now on I don't think I can get any more information that will allow me to better understand the problem.
However, as I already have the test environment ready, if you want I can do more tests. Just tell me what you need. I also have more videos made with other levels of assistance.
What I can't do is try to improve the engine's firmware because I don't do software development.
Problem description
When I cycle on sloped roads, with at least 6% slope, what I feel is that in certain situations, if I stop pedaling 1 or 2 seconds and then start again, the engine only responds after I have been awhile push and rotate the pedals, 1 or 2 seconds. The engine response is neither effective nor immediate as soon as I start pedaling. I feel some delay in the engine's response.
So I tried to understand how the FOC engine management system works.
From what I learned the main variable that allows controlling the engine power, using the FOC management system, is the PWM.
At a given level of assistance (AL), in the FOC management system, with PWM = 0 the engine power is 0.
With PWM equal to 100 the motor power is the maximum.
My objective, in the tests I carried out, is to have the PWM = 100 constant as long as possible, in each AL, and to see the motor current behavior. I also checked Human Power.
In the lower ALs, maximum engine power cannot be reached because we are requesting too little engine power. Therefore, PWM = 100 cannot be reached. The power we are asking for from the engine is less than the maximum power and as such we have not reached PWM = 100.
(maybe I'm not 100% correct, but I shouldn't be too far from reality, I hope so)
TSDZ2 Motor, Firmware and Battery Description
The motor is 48V. The Chainring is 42 teeth and the cassette is 11-50.
The battery is 15S, with a maximum voltage of 63V and a nominal voltage of 54V. The battery can discharge a maximum of 35A (peak). Continuously, it can discharge 20A. The battery BMS is configured to be able to achieve a maximum discharge of 40A (Peak).
The firmware settings (V1.0.0) are as follows:
- Assist Levels are the default as in the image below.
- With the calibrated torque sensor
- Startup Boost - Disable
- Temperature sensor installed
- Cadence fast stop - No (disable)
- Current battery - 20A
- Motor current - 30A
- Motor Control - Power
- Current ramp - 10
- Min current ADC Step - 6
- Field Weakening - Disable
- Street Mode disable
- Assist w / o pedal rot - disable
- Without brake sensor
- Battery resistance - 380 (I can't measure the resistance with this version of Firmware)
With these Current settings (BMS current, Firmware Battery Current and Motor Current), I am not imposing any limitations on the TSDZ2 / Firmware.
 Test Description
Test Description
The videos were mostly made on a ramp of about 750m and with a maximum slope of 9%, as shown in the figure.

Whenever possible I try to reach PWM = 100
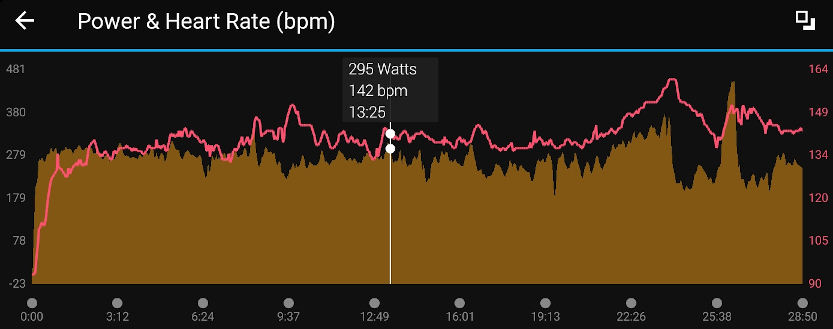
In the video, Level 13 Human Power, which I present below is visible that when I start pedaling again after a stop of about 1s the engine does not start immediately when I start pedaling. In some situations it is only after 1.8 seconds that the engine starts. This situation can be observed at 1: 25s of this video.
In the table, I present below, you can see the delays detected in the assistance levels 9, 11 and 13. The table shows the time of the occurrence.
Motor Current and Human Power are the fields shown on the displays in each Video.

The videos are shot with a GOPRO at a speed of 30 frames per second.
On youtube you can watch the video in slow motion.
At the end of each video you can see the graphics of the battery and motor current as well as the Human Power.
I also use the free Windows VideoPAD software, by NCH Software. With this software I can see the video images frame by frame.
[youtube]xnIuSR0pMes[/youtube]
[youtube]0QzXlVxvNFk[/youtube]
[youtube]xosa4rvcS7c[/youtube]
[youtube]GAUzipgIwoc[/youtube]
Conclusions:
1 - No, I had any problem being permanently with PWM = 100, at least above the level AL = 9. In the other lower ALs I haven't tested it yet.
There is no problem from level 9 to 20 in maintaining the PWM = 100. It is easy to maintain a constant engine speed. It is necessary to pay attention to the value that reaches the temperature in order not to burn the engine. Even at level 20, the motor current in the peaks only reached 19Amp.
2 - The battery current, in the firmware graphics, reaches 35A.
So I suggest that the battery current limit is higher than the 20 that can be configured in this version of the FW.
3 - The delays related to power, as described, in AL 9 are not very noticeable. But at level 11 they already have high values.
4 - With the current version V1.0.0 and from now on, when I am going to do mountain bike rides, with steep slopes and with terrain with obstacles, I will use the AL until 9 (10?). I will not use the upper levels.
Thanks